 |
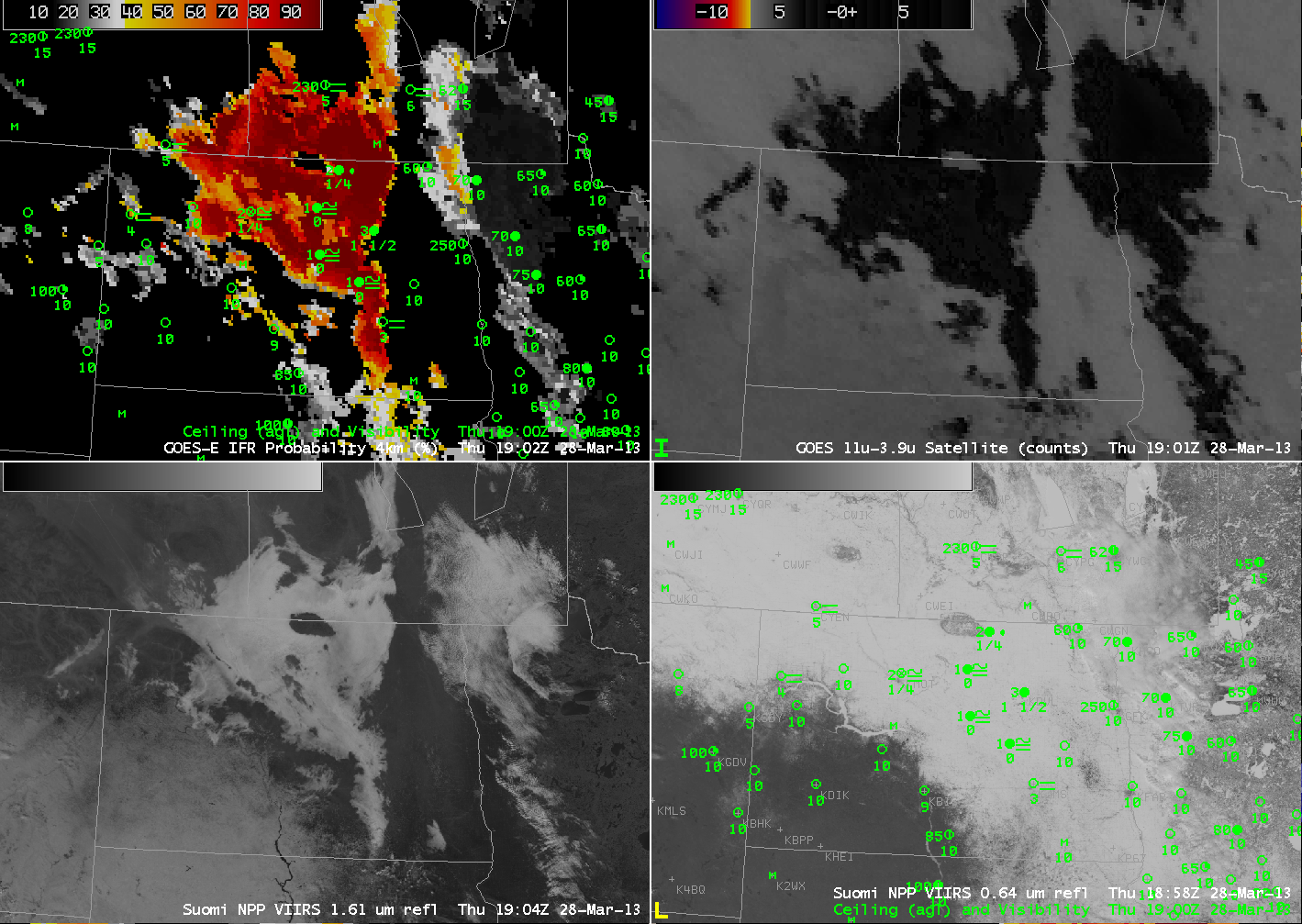
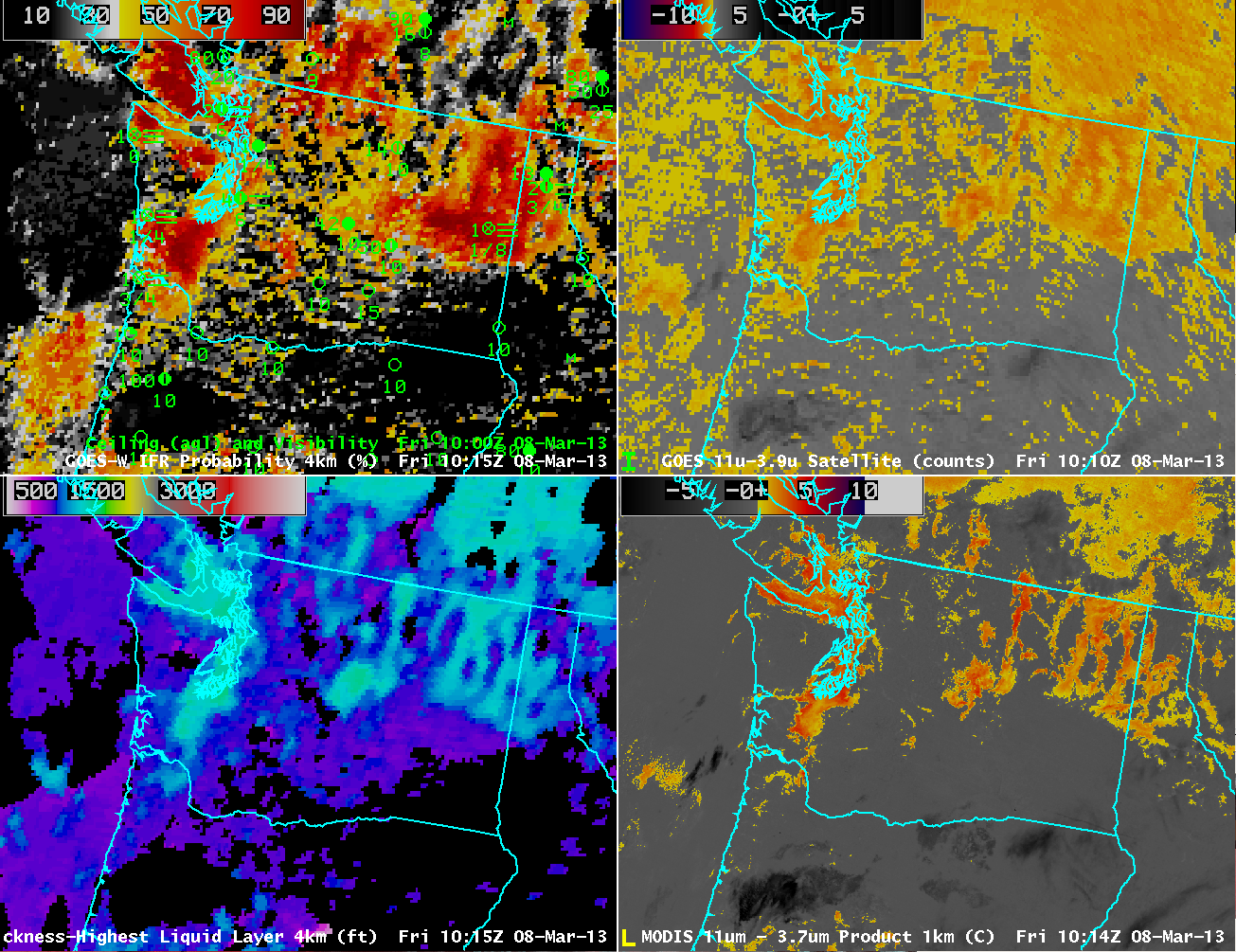
| Toggle between Suomi/NPP Day/Night Band (i.e., Night-Time Visible Imagery, 0.70 µm) and Brightness Temperature Difference field (10.8 µm- 3.74 µm) at 0734 UTC on 28 March 2013 |
The image toggle above shows an area of stratus over central Missouri and surrounding states. The stratus shows up in both the Night-time visible Day/Night band from Suomi/NPP (March 28th is one day past the Full Moon, so there is plenty of lunar illumination, and indeed lunar shadows from the higher cirrus clouds over Illinois, Kentucky and Tennessee are apparent). The brightness temperature difference field crisply highlights the region of lower, water-based clouds. That difference field arises from the differences in emissivity properties of the water-based clouds: they emit nearly as a blackbody around 11 µm, and not as a blackbody at 3.9 µm.
A key question for this scene is: is this cloud that is depicted stratus at mid-levels, or is it fog? From the top (that is, as the satellite views it), a stratus deck will look very much like a fog bank. The satellite gives little information, however, on how thick the cloud is, or on how close to the ground it sits. A satellite-only fog detection algorithm, therefore, will include many false positives.
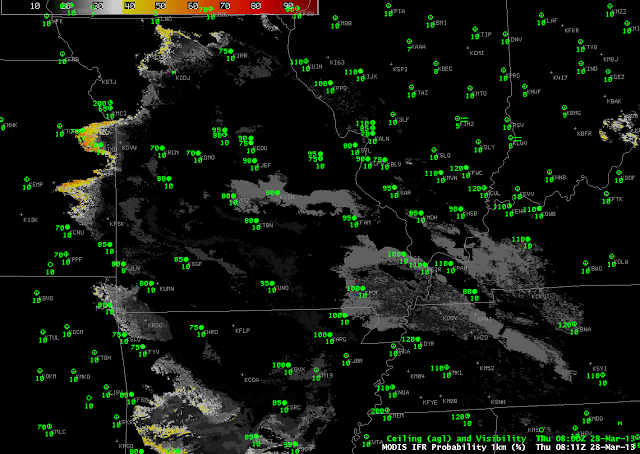 |
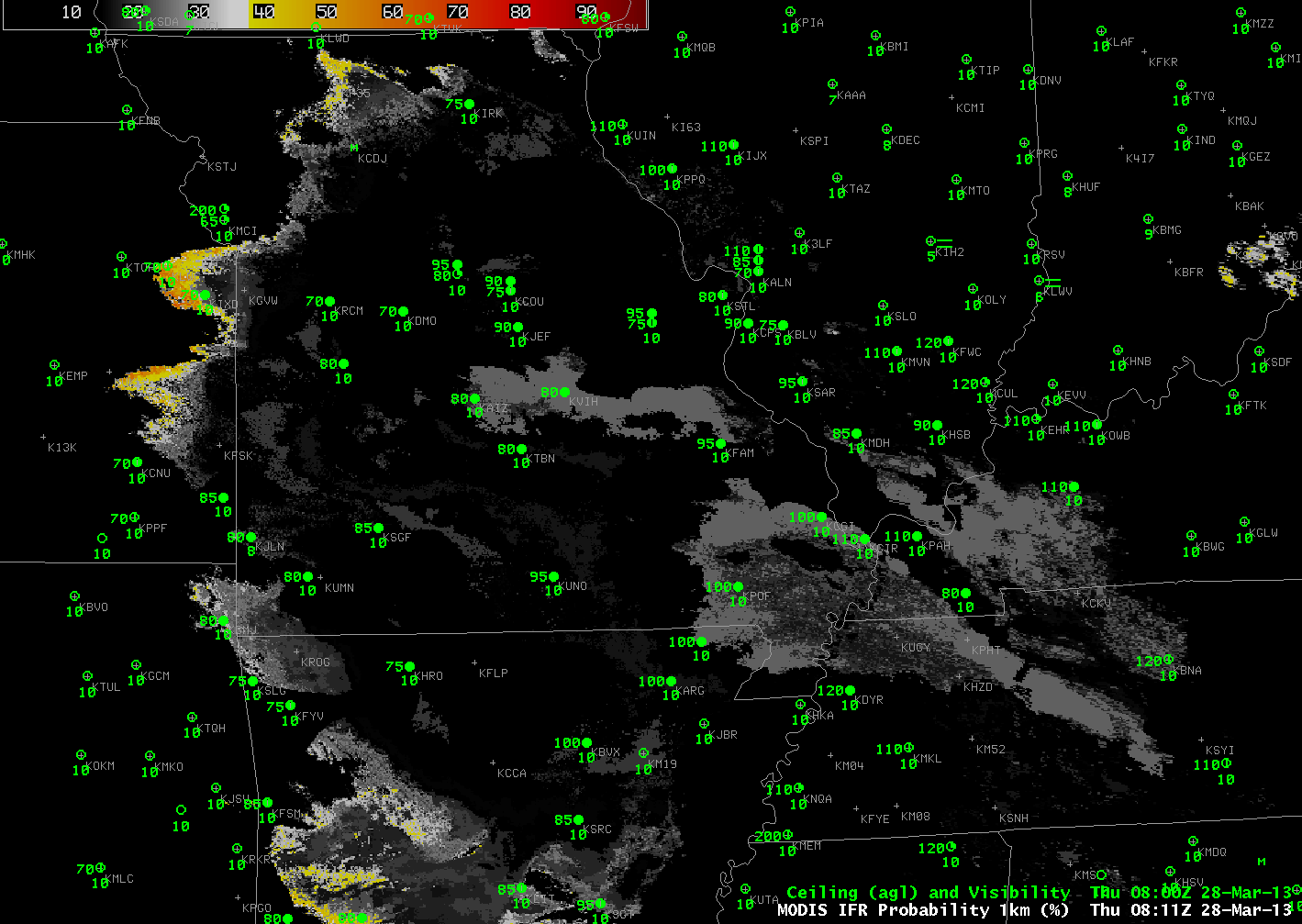
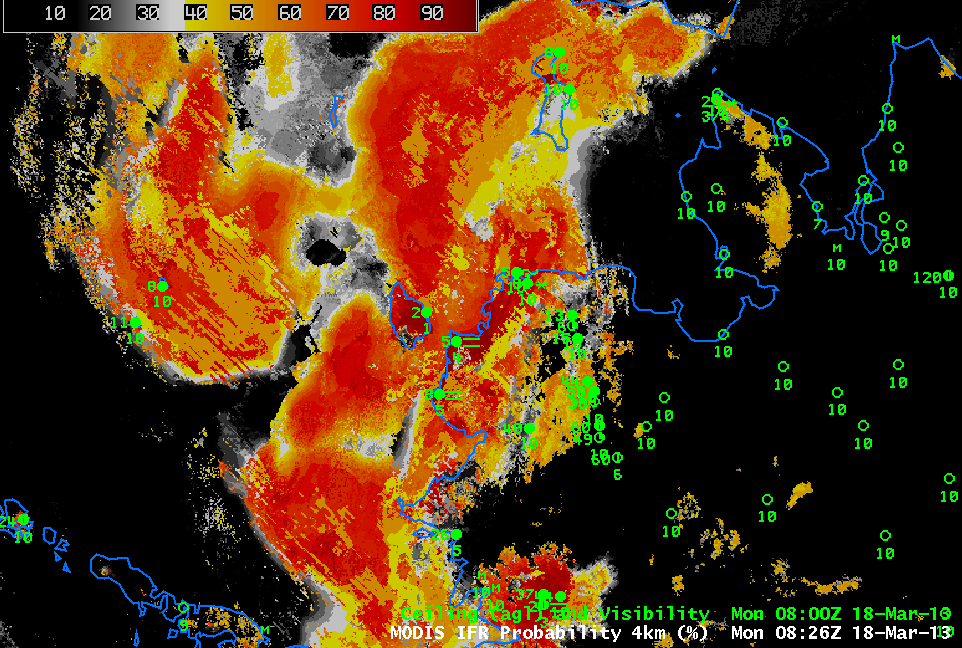
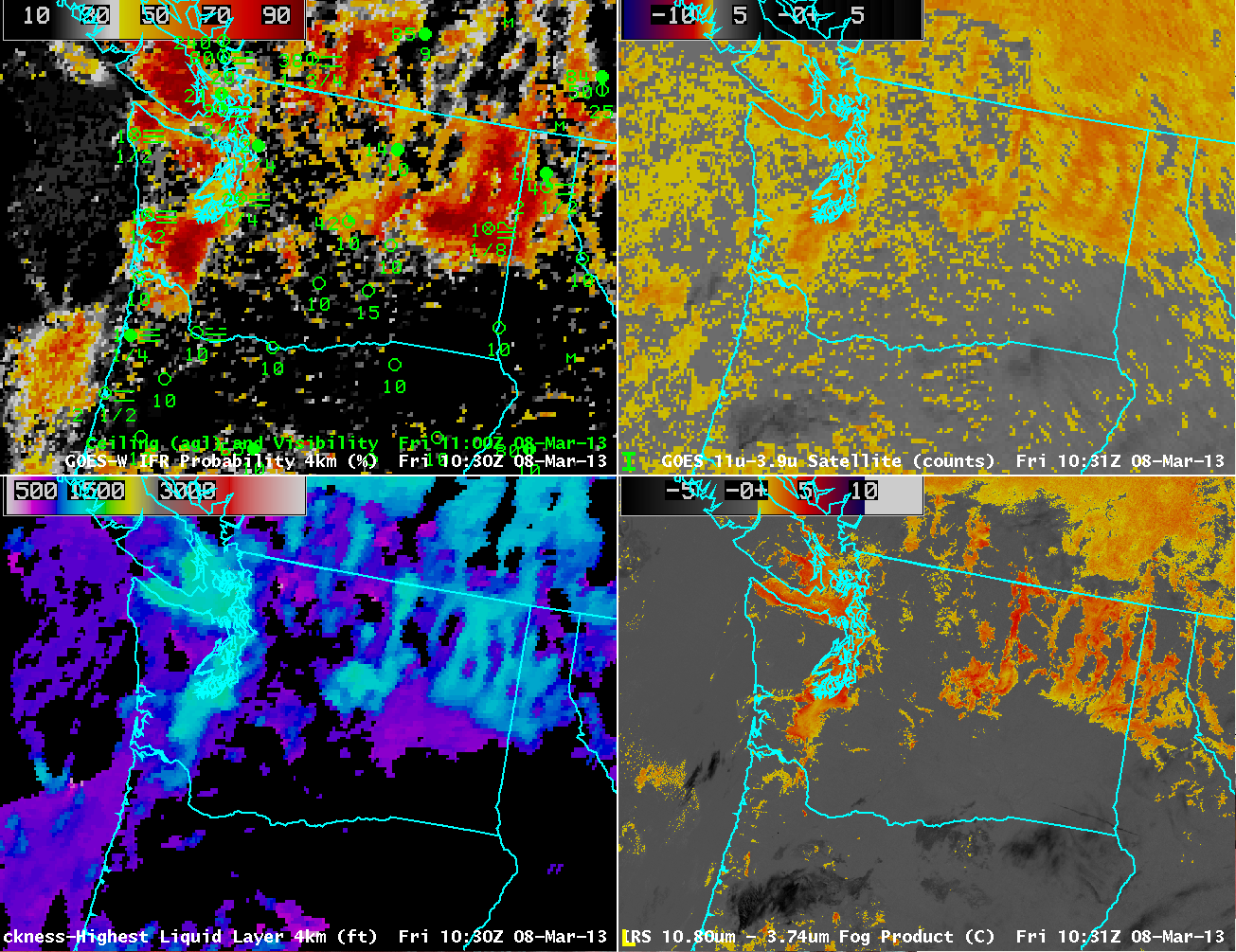
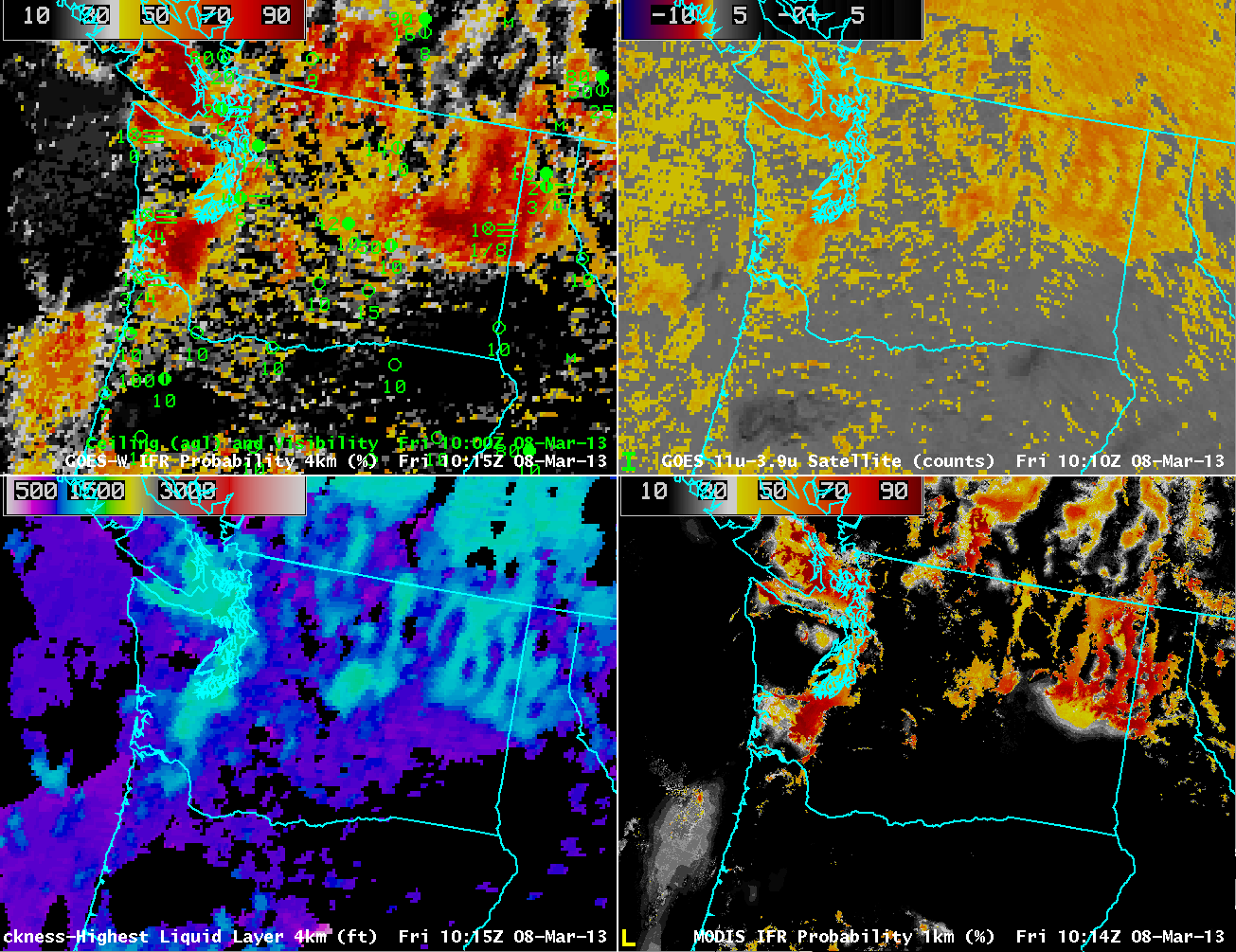
| MODIS-based IFR probabilities, 0811 UTC on 28 March 2013 |
IFR probabilities include data about the surface that are incorporated into the Rapid Refresh Model. This fused product clarifies where the brightness temperature difference product is detecting mid-level stratus versus low-level fog. In this case over Missouri, IFR probabilities are very low throughout the scene because saturation at low levels in the Rapid Refresh is not occurring, and therefore IFR probabilities are low.
By blending information about the top of the cloud (the brightness temperature difference product) with information about the bottom of the cloud (the Rapid Refresh model data), a more accurate depiction of the horizontal extent of IFR conditions is achieved.