 |
| Area of focus in the Eastern Aleutians in Southern Alaska |
Due to the location of Alaska, geostationary satellite data can sometimes be difficult to work with. This is because the large satellite angle causes the satellite footprint to increase, thus decreasing the spatial resolution of the data. However, even though the spatial resolution is not ideal the temporal resolution allows geostationary satellite data to remain useful. The example below shows and area of fog/low stratus (FLS) moving northwestward toward the eastern Aleutians in southern Alaska.
 |
| GOES-R IFR probabilities computed using GOES-15 (left) and MODIS (right) around 08:20Z on May 30, 2013. Note that the images are rotated so true north is actually oriented from the lower left corner of the images to the upper right corner. |
In the image above the orange and darker red colors indicate areas with a high probability of FLS over the northern Gulf of Alaska. The difference in spatial resolution stands out when comparing the images, however, it should be noted that the same areas of higher probabilities in the MODIS image are also picked up in the GOES image, just at a coarser resolution. Although the MODIS image looks more detailed than GOES, temporal trends can not be discerned from a single image. The next available MODIS pass over the area was at 12:26Z.
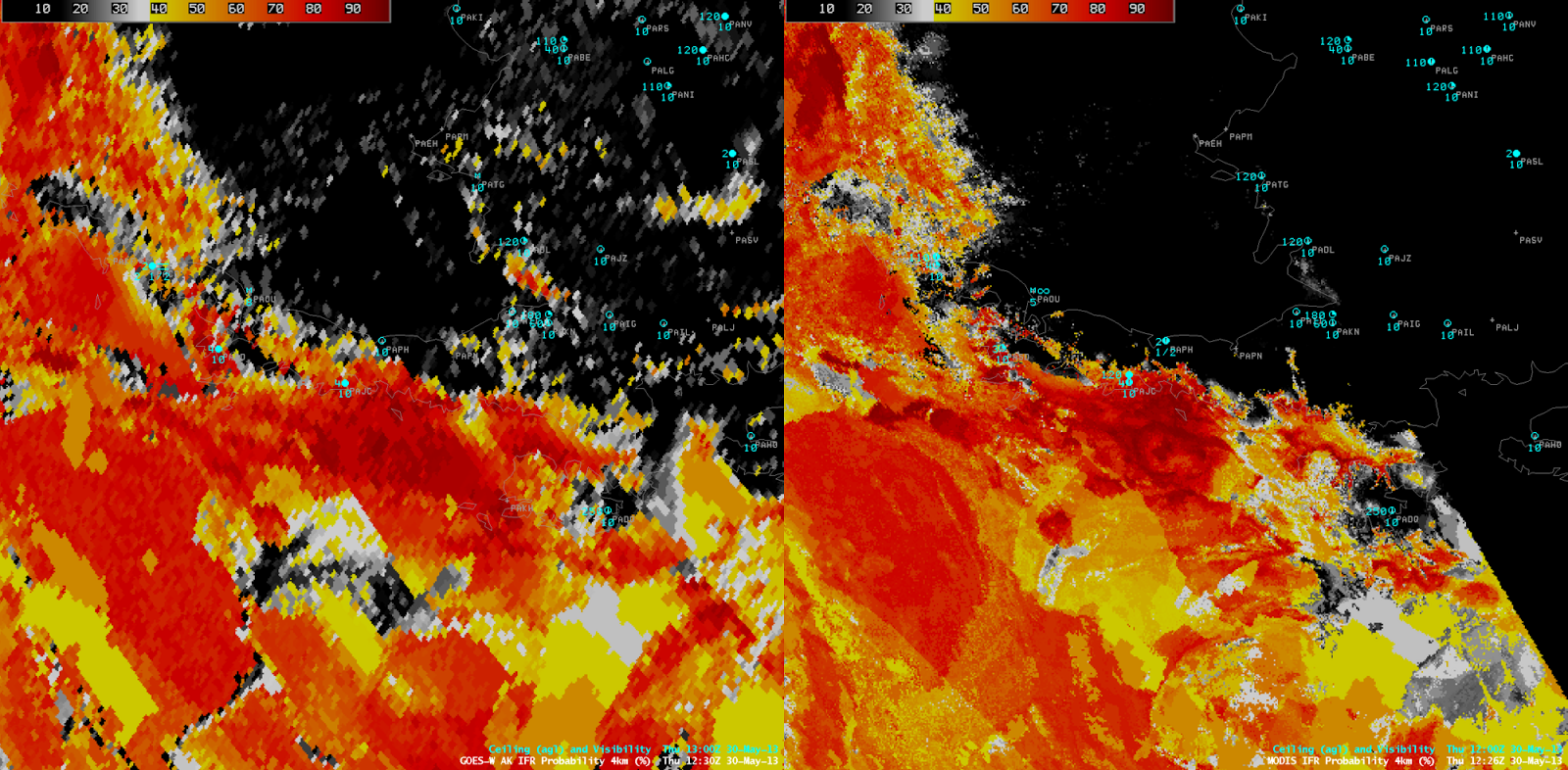 |
| GOES-R IFR probabilities computed using GOES-15 (left) and MODIS (right) around 12:26Z on May 30, 2013. Note that the images are rotated so true north is actually oriented from the lower left corner of the images to the upper right corner. |
In the 12:26Z image the FLS deck moved northwest over the eastern Aleutians as indicated by the higher probabilities that are now over the southeastern side of the Aleutians. This is confirmed by the surface station in Chignik, AK, which reported a ceiling of 400 ft at 12:00Z when it reported no ceiling at 08:00Z. Once both MODIS passes were available the NW movement of the FLS could be observed. However, in the 4 hours between the two MODIS passes it would be hard to forecast whether the IFR conditions would move into the area or stay out at sea.
On the other hand, GOES data was available about every 15 minutes. By animating the GOES images such as this, the slow NW movement of the FLS can be tracked and a better approximation of when IFR conditions will reach the Aleutians can be made. IFR conditions were first reported at Chignik, AK at 09:00Z, just as the higher GOES-R IFR probabilities reached the coastline. Also from the animation, it appears that the eastern Aleutians block the movement of the FLS deck from continuing over to the NW side into the Bering Sea. This blocking might be difficult to interpret from the two MODIS images alone.
Alaska has the largest coastline in the U.S. (more than twice the size of the entire lower 48, including Hawaii) where hazardous areas of FLS can move onshore. Although the high spatial resolution available from MODIS provides more detail in a single scene than GOES, the high temporal resolution that GOES offers makes finding trends in the movement of hazardous low clouds possible. This is another example of how looking at the GOES-R FLS products using GOES and MODIS together can be more useful than using only GOES or MODIS.

{kind=link}