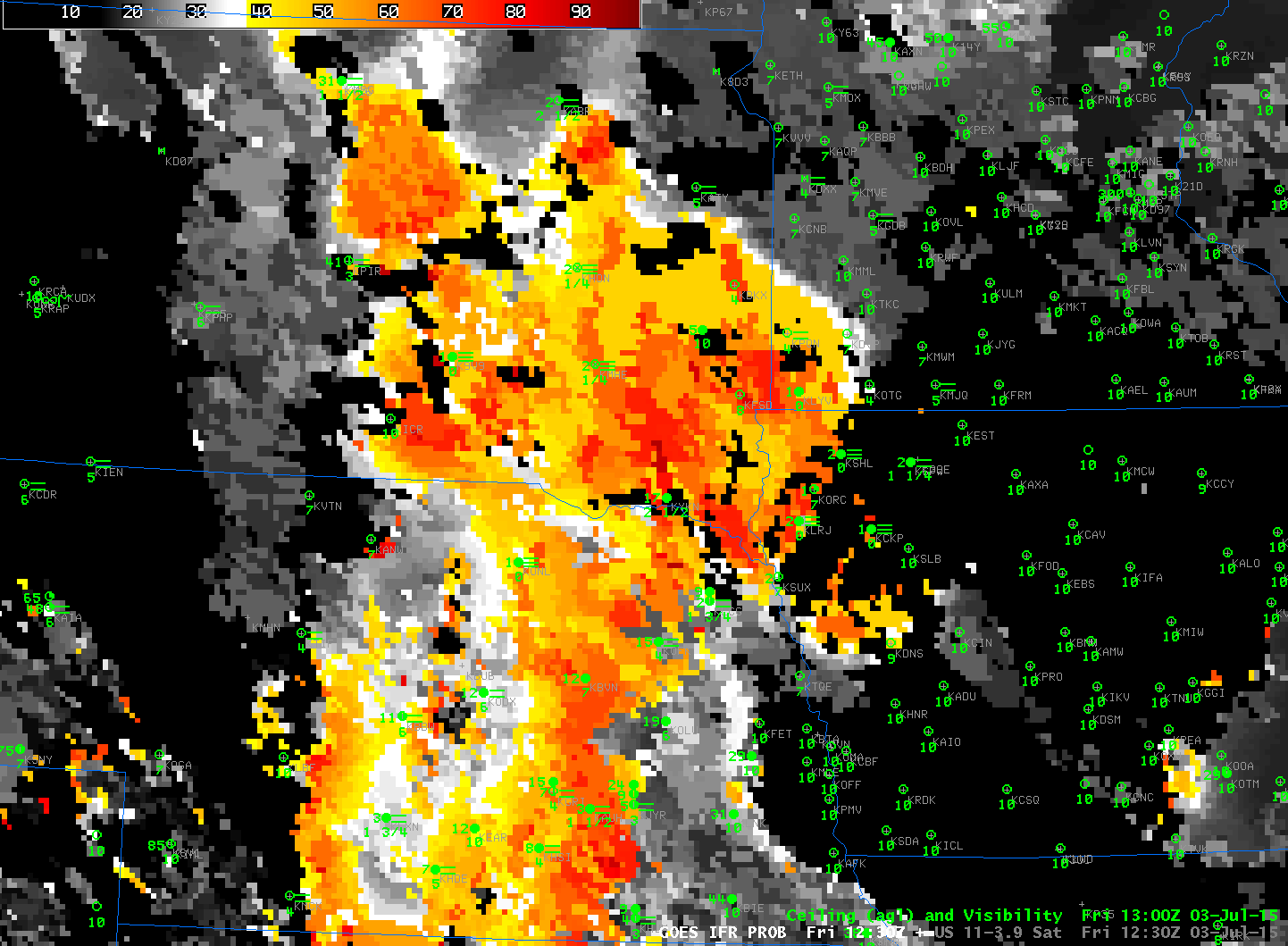
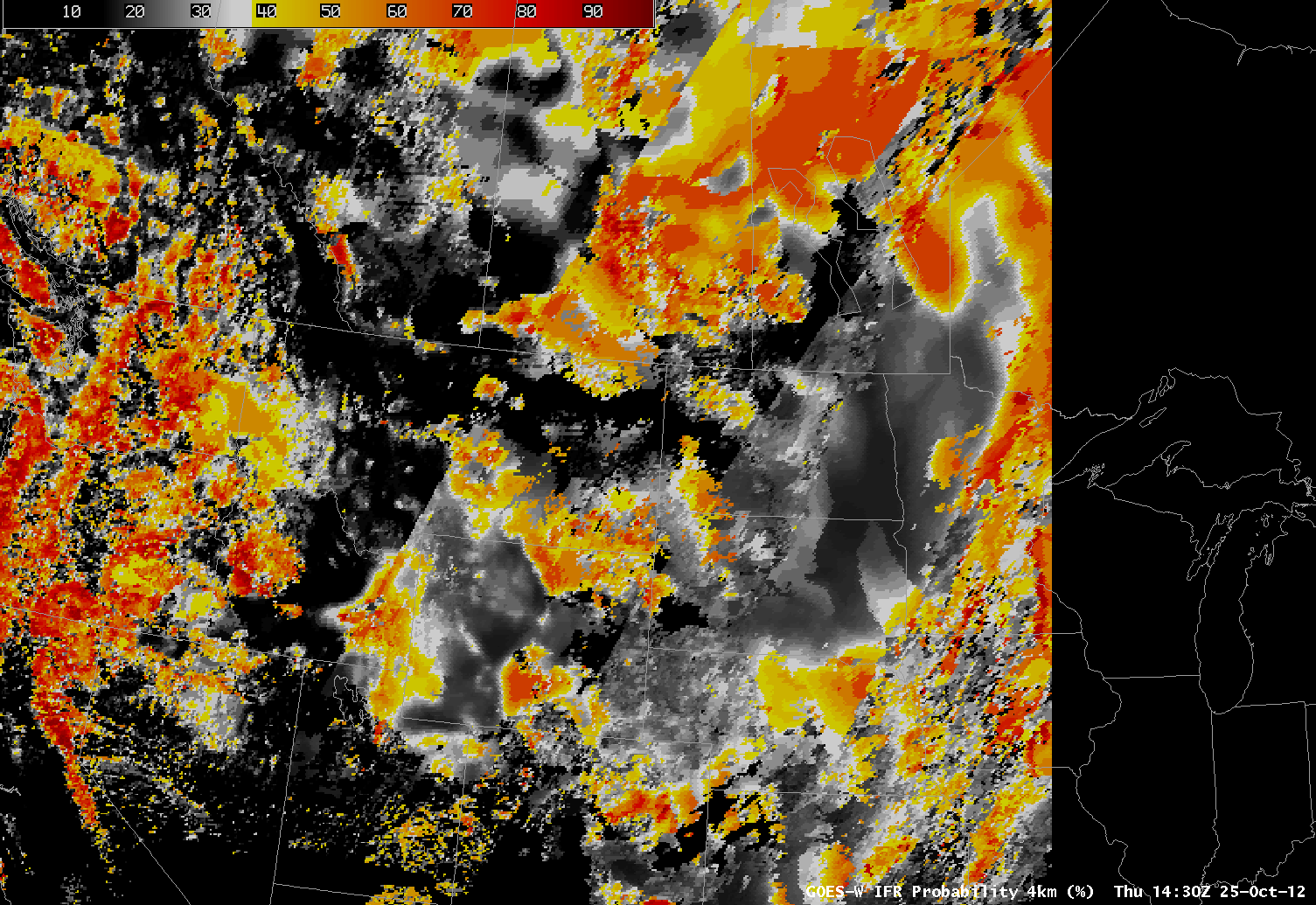
GOES-R IFR Probability fields, 1045, 1215 and 1300 UTC on 1 August 2016 (Click to enlarge)
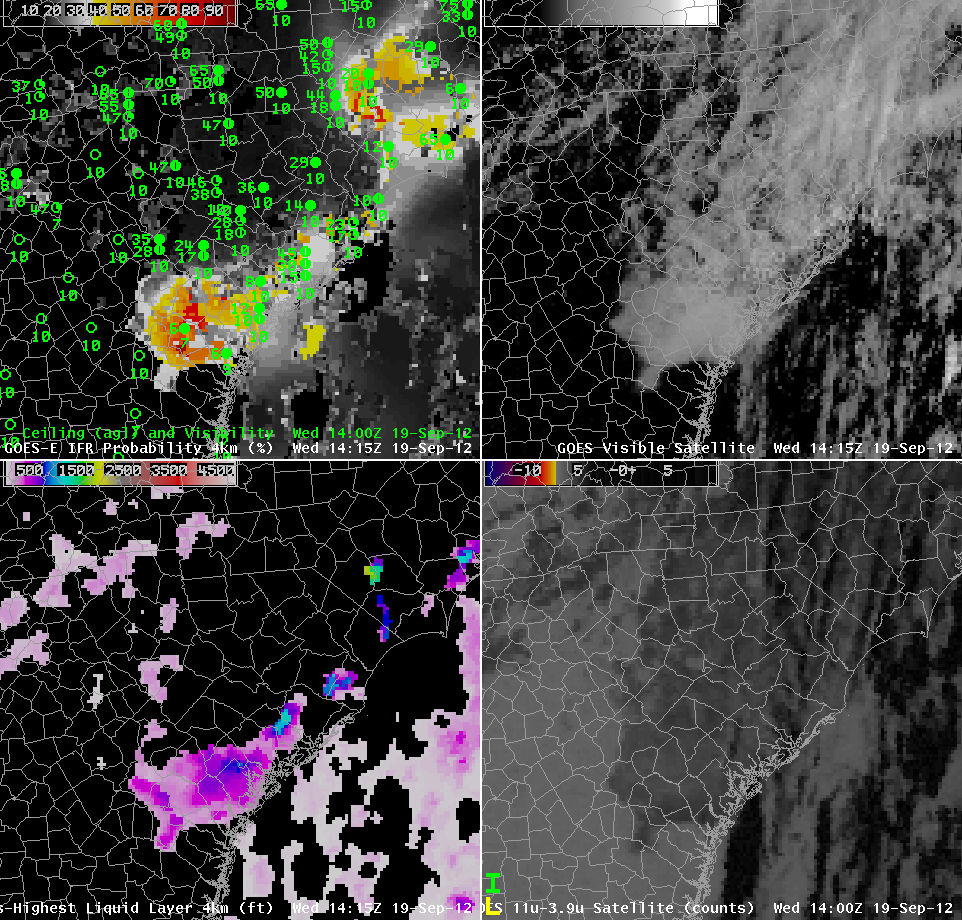
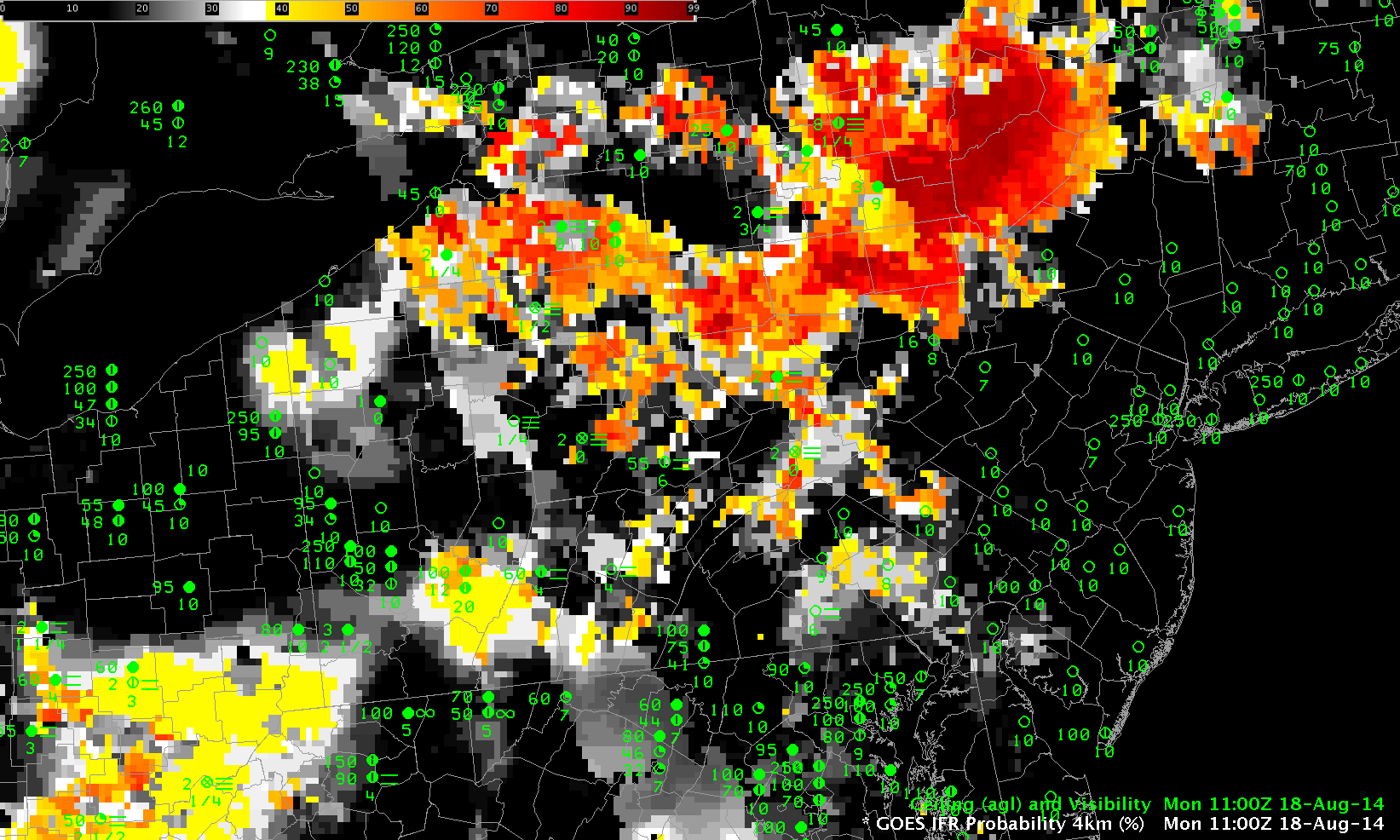
A benefit of the GOES-R IFR Probability field is that a coherent signal is maintained through sunrise (or sunset). The traditional method of detecting fog that uses the brightness temperature difference between 10.7 µm and 3.9 µm cannot maintain a consistent signal through sunrise as the amount of reflected solar radiation with a wavelength of 3.9 µm increases, overwhelming the emissivity-driven differences between 10.7 µm and 3.9 µmbrightness temperatures that are observed at night. Consider the animation above, that shows GOES-R IFR Probability fields at 10:45 UTC, 12:15 UTC and 13:15 UTC. First: The GOES-R IFR Probability fields do a fine job of outlining where the lowest ceilings and poorest visibilities exist in this scene over Wisconsin both before sunrise and after. The noticeable difference between the 1045 UTC and 1215 UTC fields is driven by a change in predictors that occurs as night transitions into day.
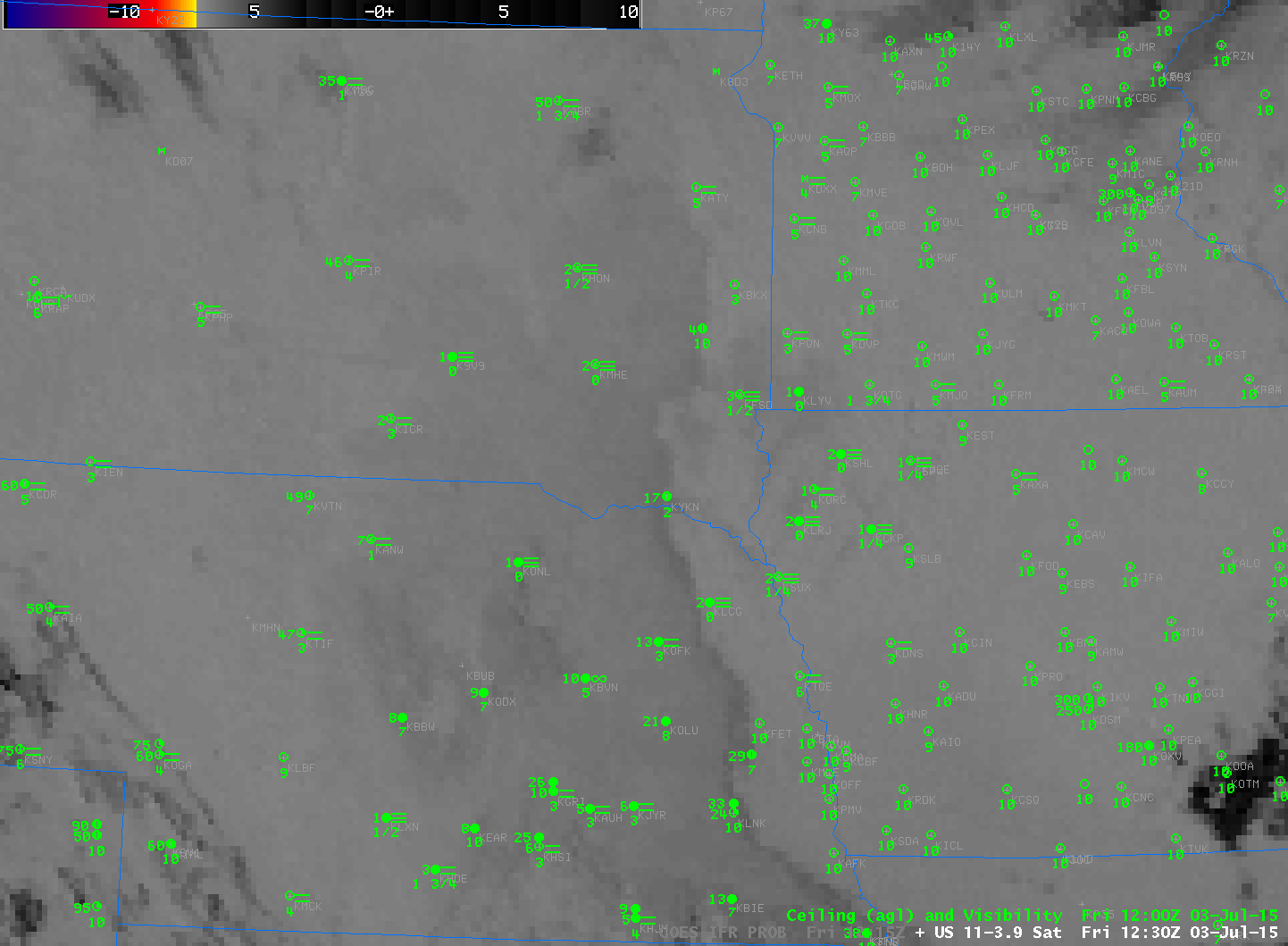
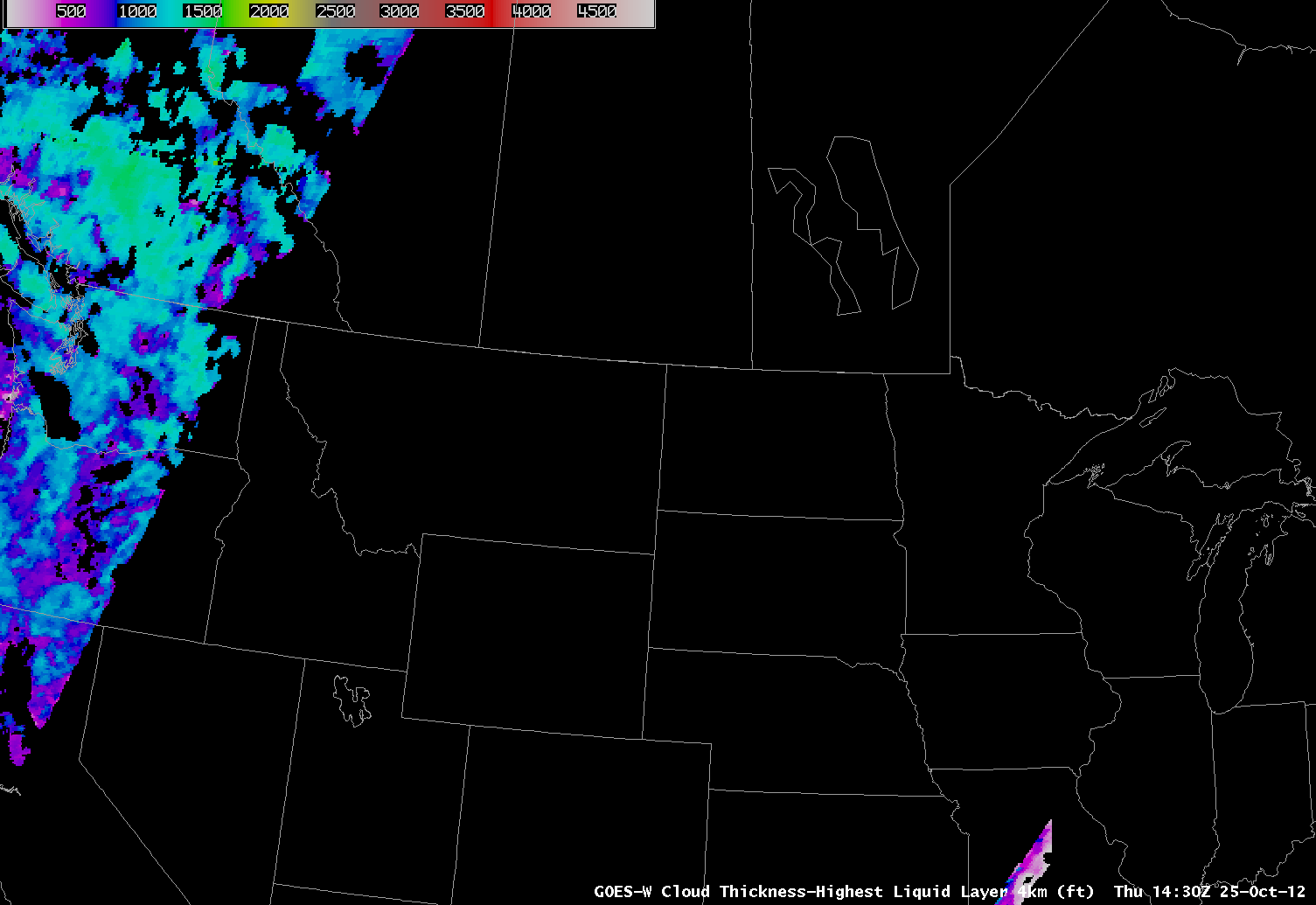
GOES-13 Brightness Temperature Difference fields (3.9 µm – 10.7 µm) are shown below. There is a strong signal at 1045 UTC, but little or no signal at 1215 UTC, before it returns (with opposite sign) at 1315 UTC.
GOES-13 Brightness Temperature Difference Fields (3.9 µm – 10.7 µm) at 1045 UTC, 1215 UTC and 1315 UTC. (Click to enlarge)


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}