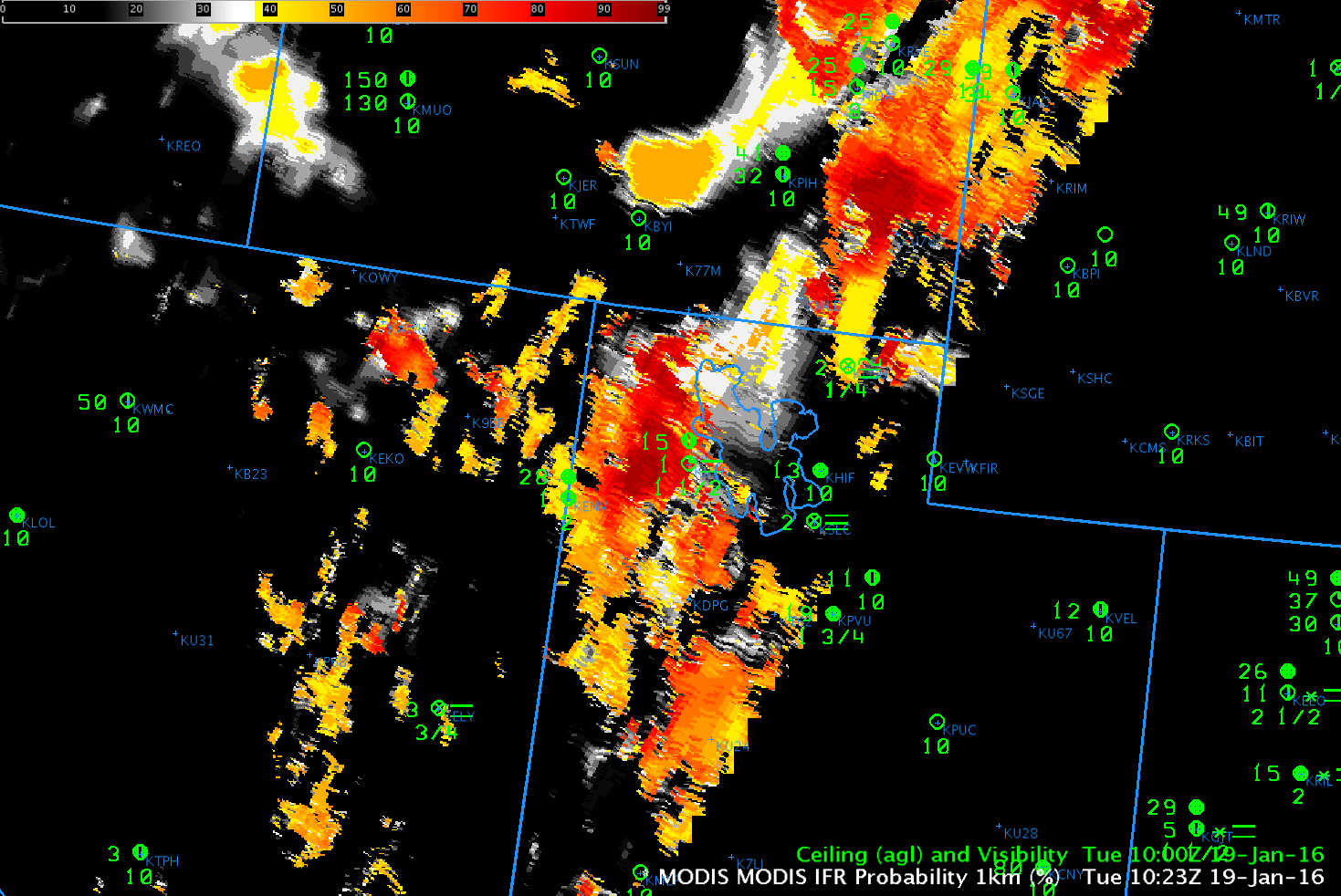
GOES-R IFR Probability (Upper Left), GOES-R Cloud Thickness (Lower Left), GOES-East Brightness Temperature Difference (10.7µm – 3.9µm) (Upper Right), GOES-East Water Vapor (6.5µm) at night, Visible Imagery (0.65µm) in day (Lower Right), hourly from 0315 UTC through 1400 UTC 29 January 2015 (Click to enlarge)
The animation above shows hourly imagery, from 0315 through 1400 UTC on 29 January 2016 (Click here for a faster animation). GOES-R IFR Probabilities are moving northeastward from South Carolina into North Carolina throughout the animation. Changes in surface observations of ceilings and visibilities closely match the motion of the GOES-R IFR Probability field. This is a case where the GOES-13 Brightness Temperature Field also is giving information about the presence of low clouds; GOES-R IFR Probability lends confidence to a forecaster that the stratus deck is actually fog because GOES-R IFR Probability includes information about low-level saturation (from the Rapid Refresh Model that is one of the predictors used in the statistical model used to generate IFR Probability fields).
In the early part of the animation, higher clouds are present and can be detected both in the water vapor imagery and in the brightness temperature difference (high clouds are dark in the enhancement curve used). When high clouds are present, GOES-R Cloud Thickness (in the lower left of the figures above) will not be determined as it is derived from an empirical relationship between the 3.9 emissivity of low clouds and cloud thickness that was determined from sodar observations of cloud thickness off the West Coast of the USA. High clouds prevent a determination of this relationship. Regions where GOES-R Cloud Thickness is not computed at night because of high clouds correspond very well with regions where GOES-R IFR Probability is determined by Rapid Refresh Model Output only.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}