 |
| Brightness Temperature Difference (10.7 µm- 3.9 µm) from GOES-West (quarter-hourly timestep) |
 |
| As above, but with a color enhancement applied (hourly timestep) |
Over the continental United States, the brightness temperature difference can be used, sometimes, to approximate where fog and low clouds are present because water-based clouds (such as fog and stratus) have different emissivity properties for radiation at 10.7 µm and 3.9 µm. In regions where the sun shines constantly, however, the brightness temperature difference product is harder to interpret because the abundance of scattered or reflected solar radiation with wavelengths near 3.9 µm. In the examples above, the darker region (top animation) or lighter region (bottom animation) are regions of low clouds. Regions of visibility obstruction — station PABA, for example (Barter Island on the shore of the Arctic Ocean) do not appear to be near fog/low stratus as indicated by the brightness temperature difference.
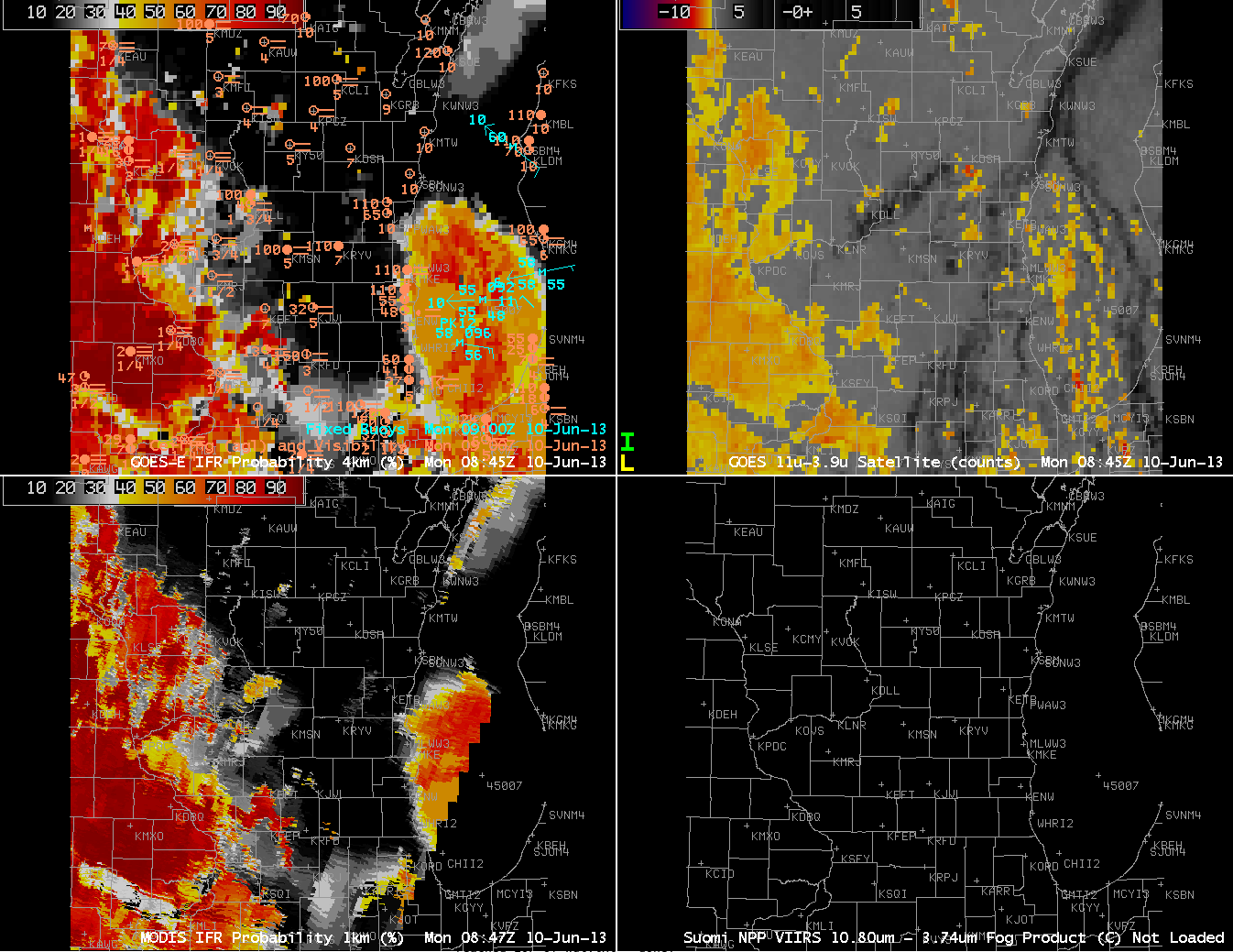
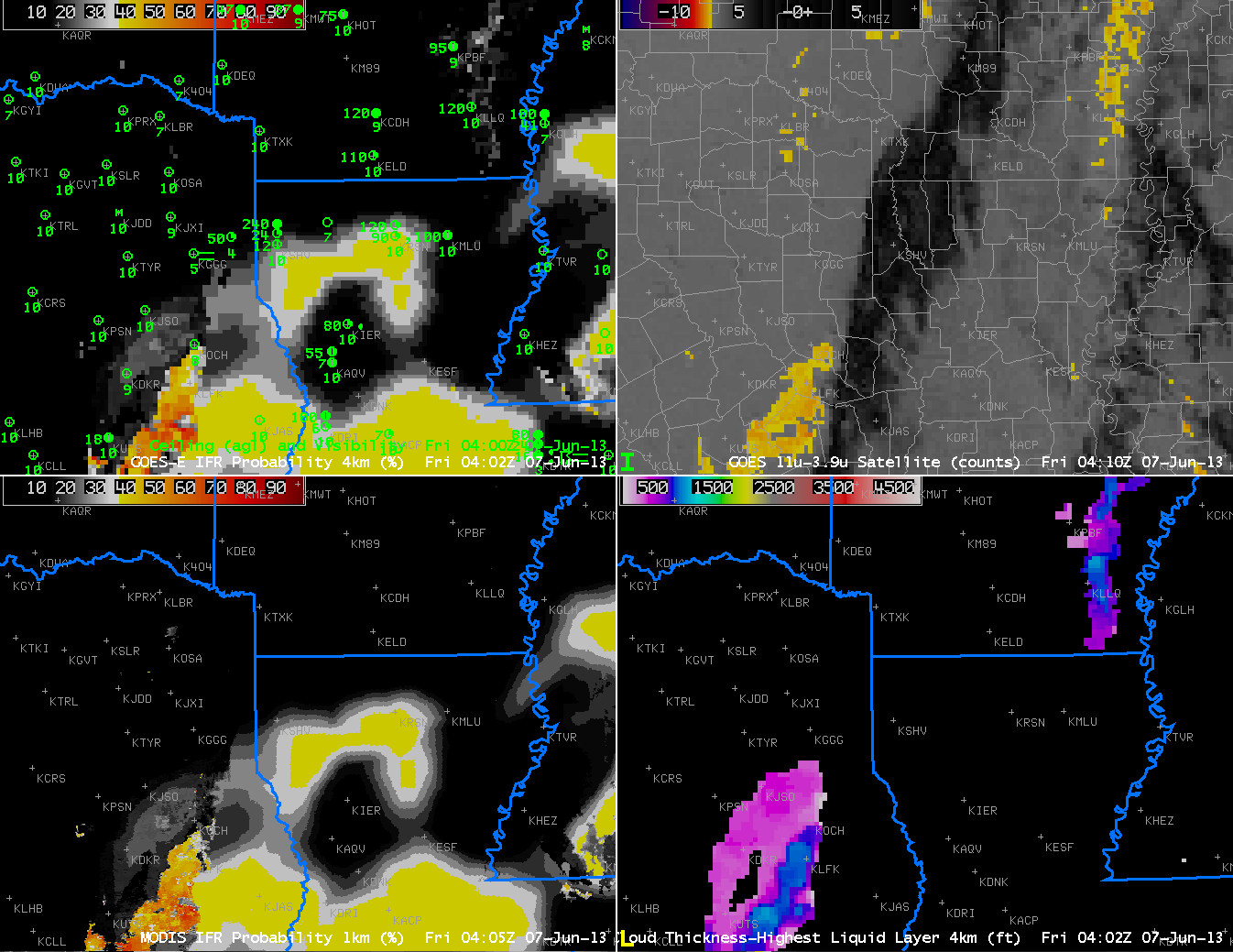
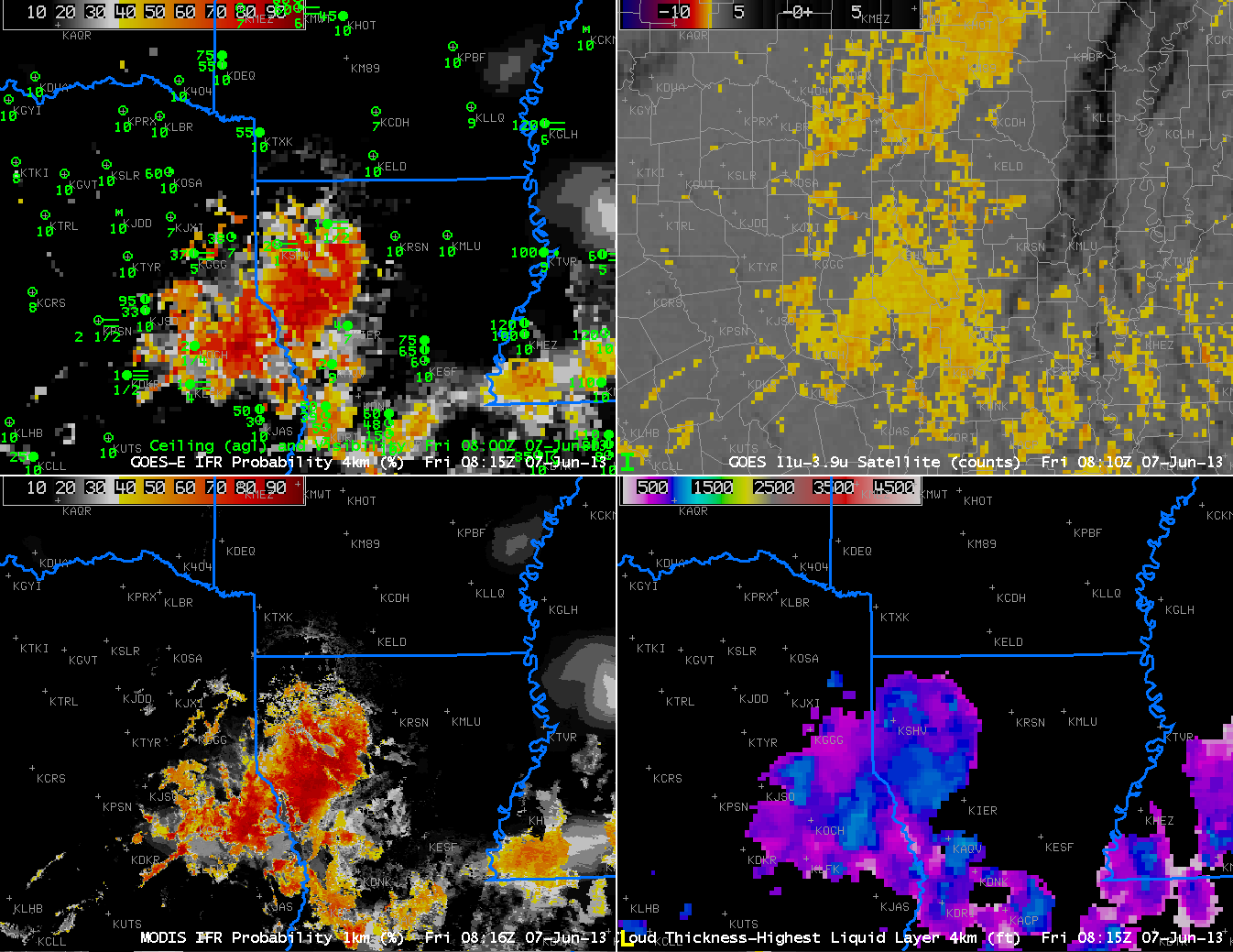
The GOES-R IFR Probability field combines Rapid Refresh data and GOES-West brightness temperature difference information (and other information, such as a cloud mask) to more accurately portray the horizontal extent of visibility obstructions. The animation below suggests high probability of IFR conditions along the Arctic Ocean shore in northern Alaska.
There are regions at present over Alaska of significant visibility obstructions due to smoke. These visibility obstructions are not predicted by the GOES-R Fog/Low Stratus product. Smoke detection typically incorporates a brightness temperature difference between 10.7 µm and 12.0 µm, and the GOES-15 Imager does not include 12.0 µm detection.
 |
| GOES-R IFR Probabilities computed from GOES-West, along with surface ceilings and visibilities. Times as indicated. |
A visible image of the north slope of Alaska, below, shows fog and low clouds very near the Arctic shore.
 |
| GOES-15 Visible Imagery, 1700 UTC 28 June 2013 |