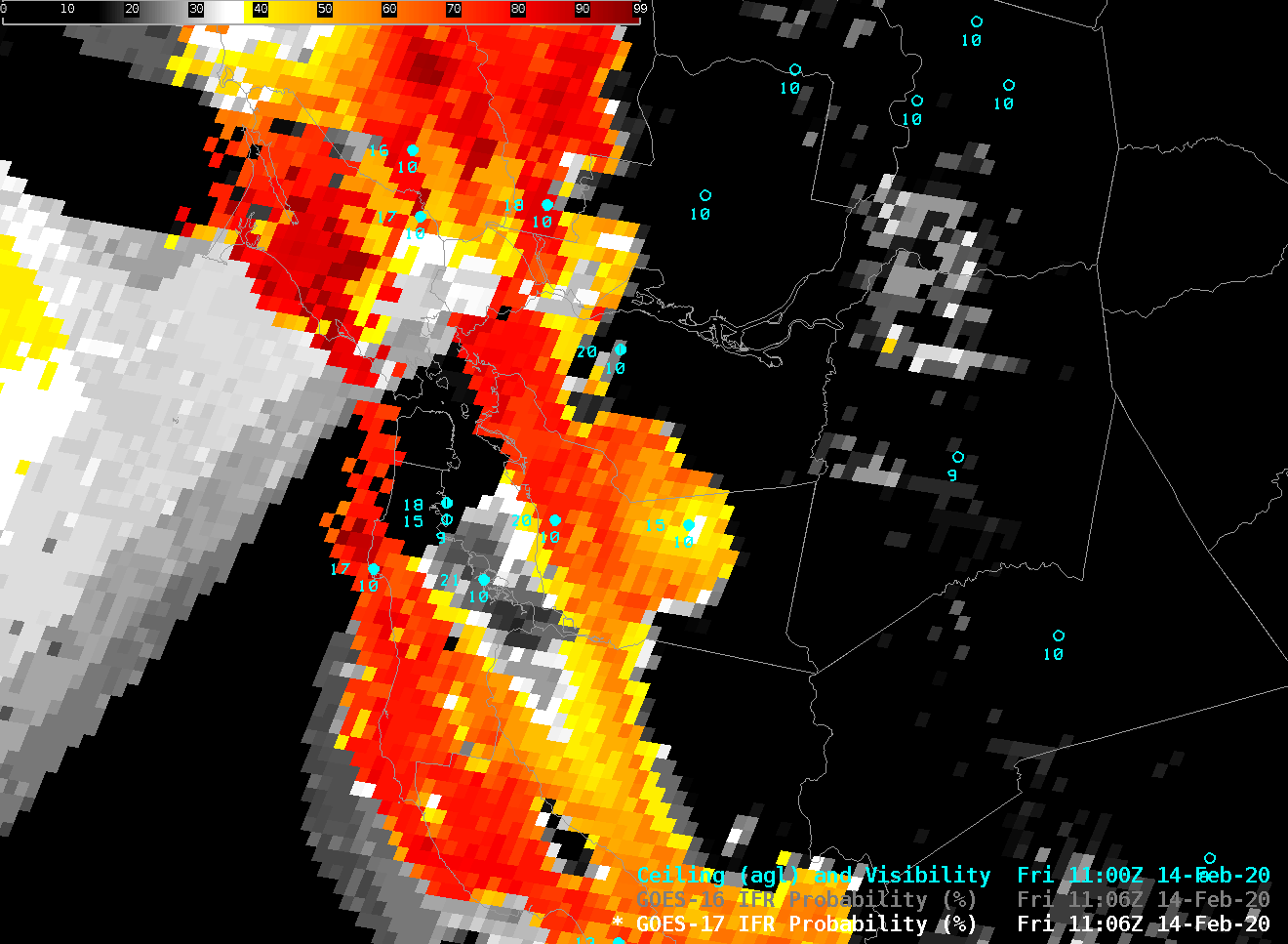
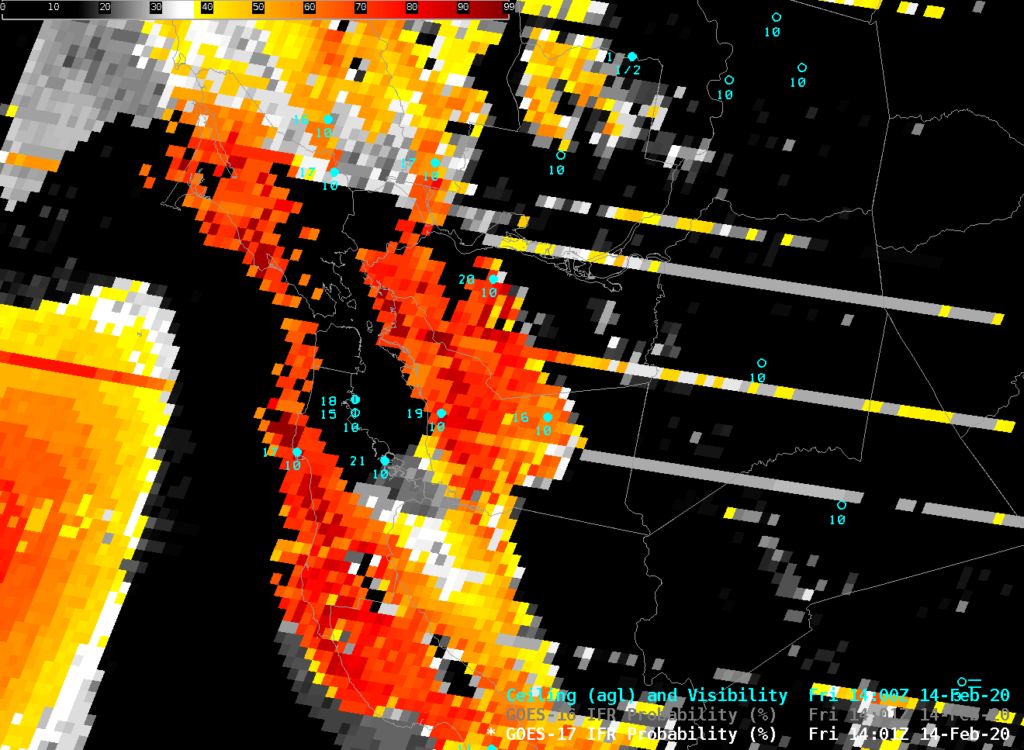
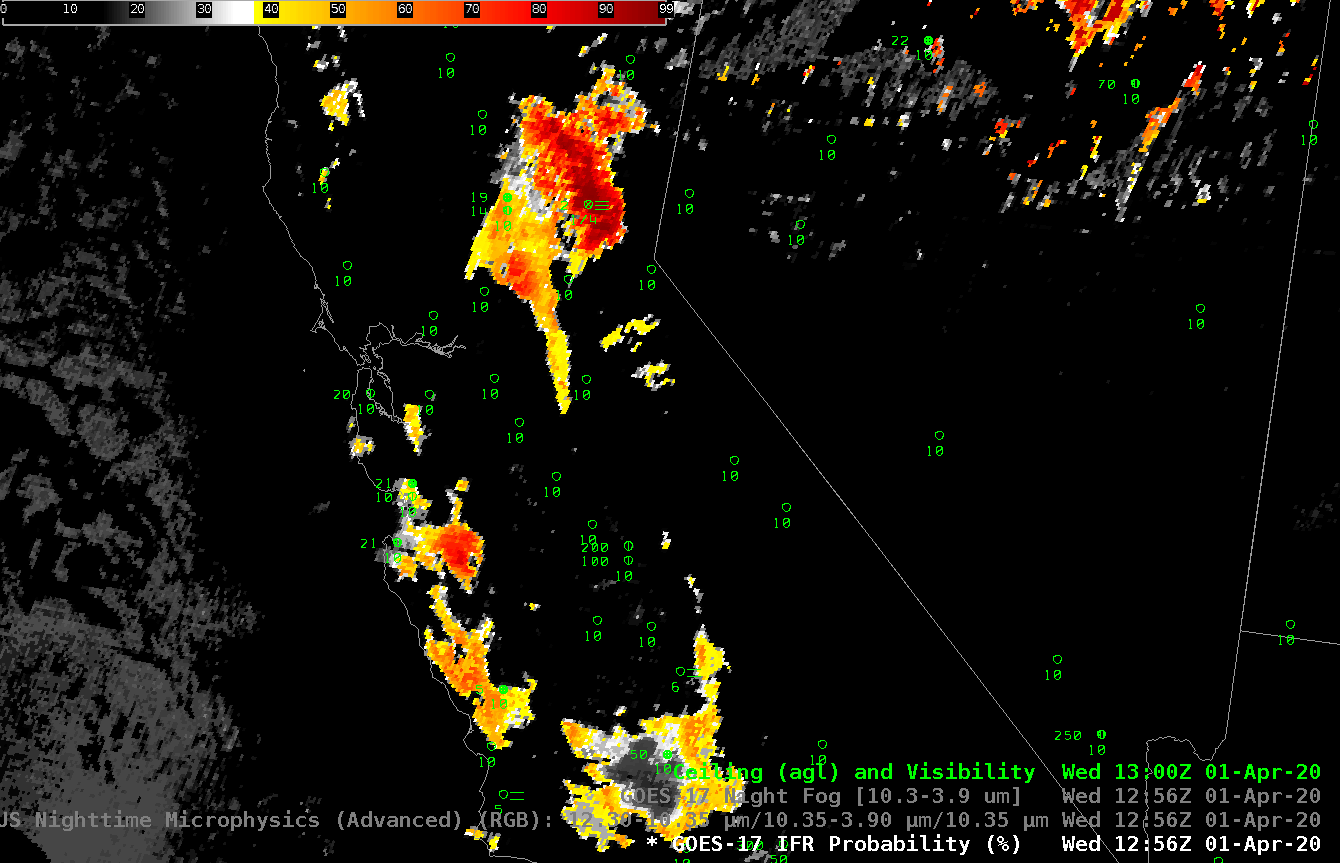
The animation above shows GOES-17 IFR Probabilities over the Pacific Northwest. This is a good situational awareness tool for fog/low stratus because it highlights regions where IFR conditions are most likely. That is, it is a quantitative product. The product also has knowledge of terrain height; if low clouds exist in regions where terrain might be rising into the clouds (for example to the northeast of Seattle WA, and to the east of Portland OR, and in Olympic National Park), IFR probabilities are heightened (pun not really intended).
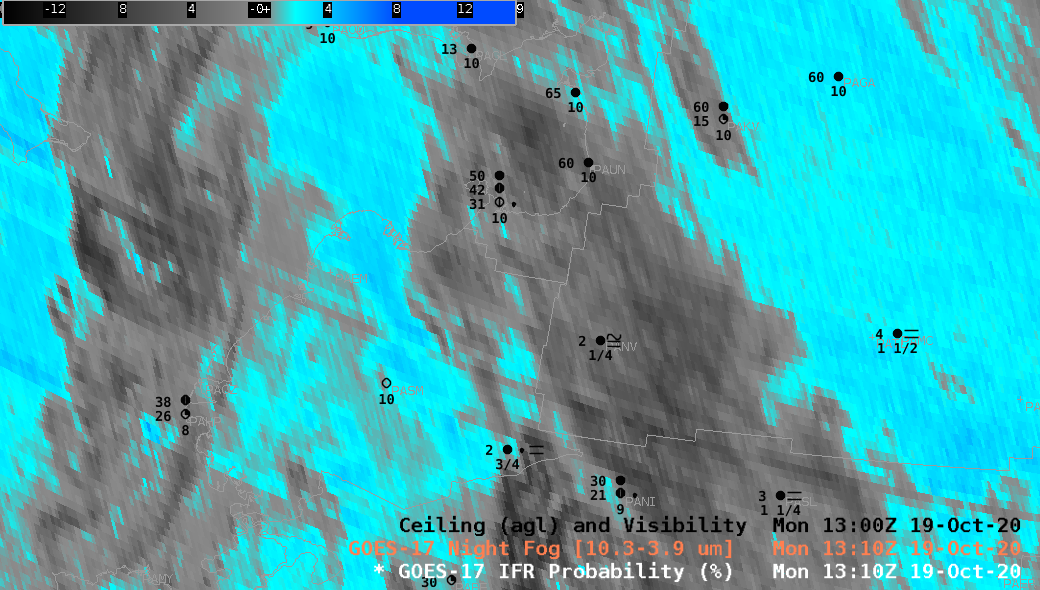
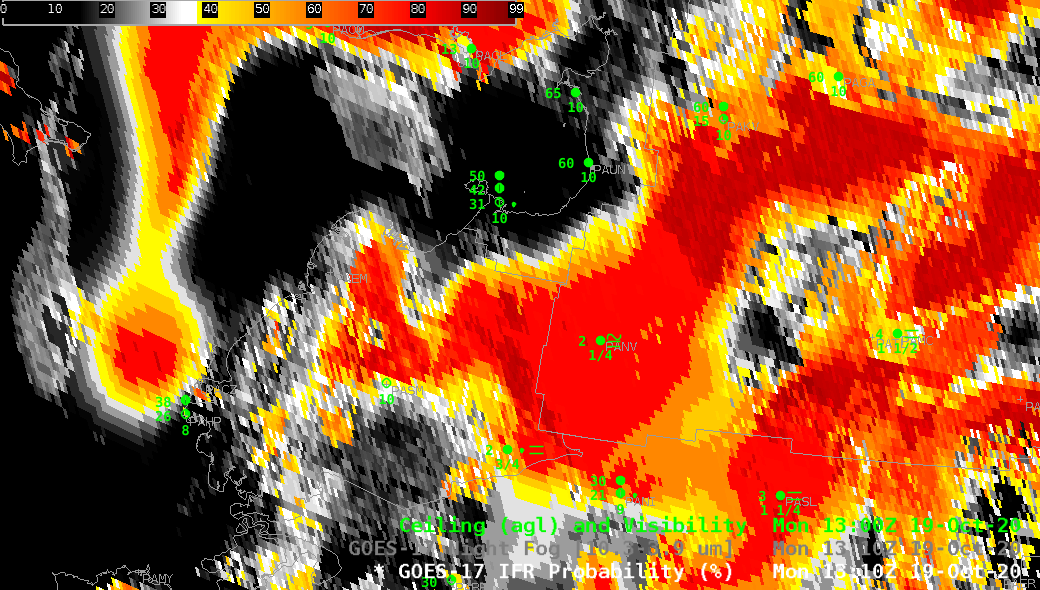
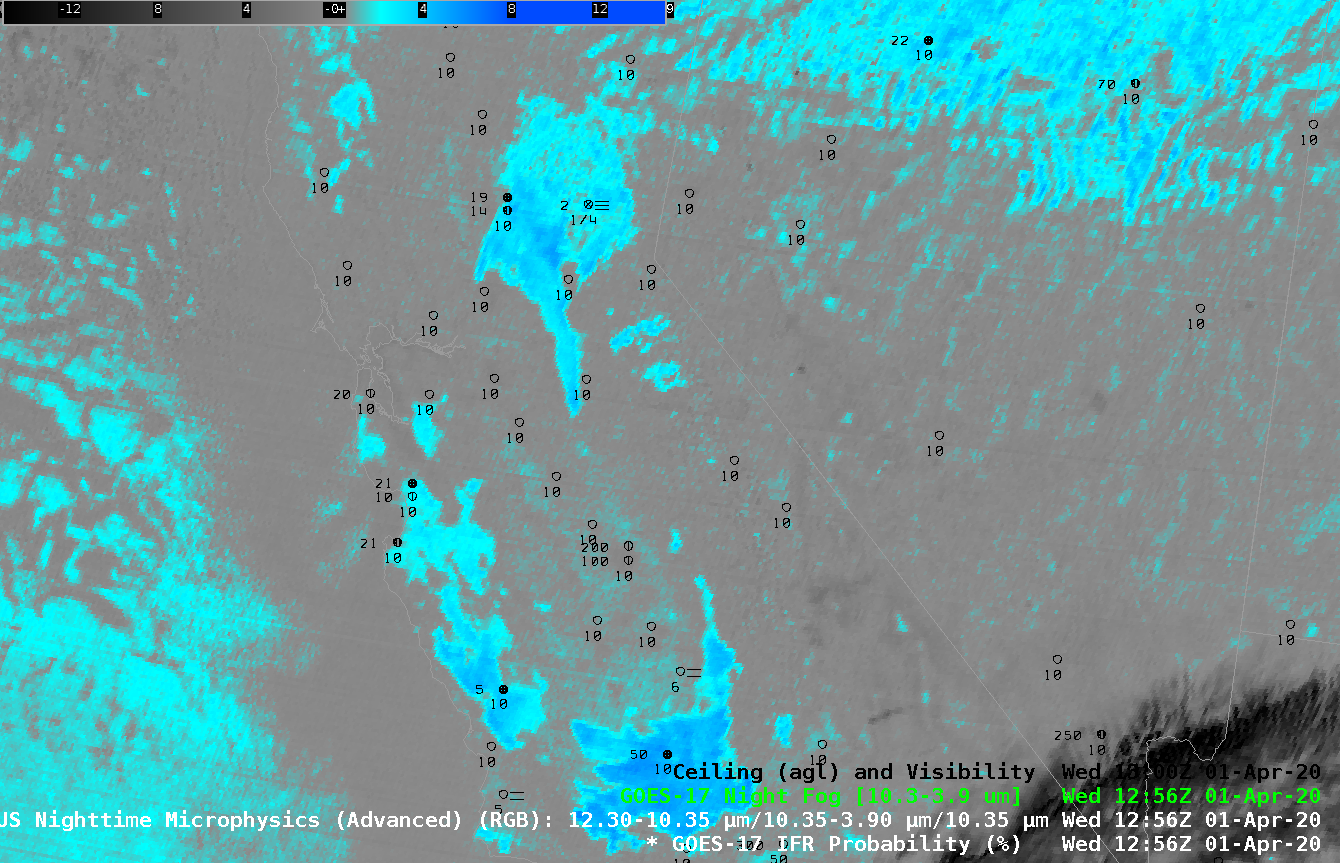
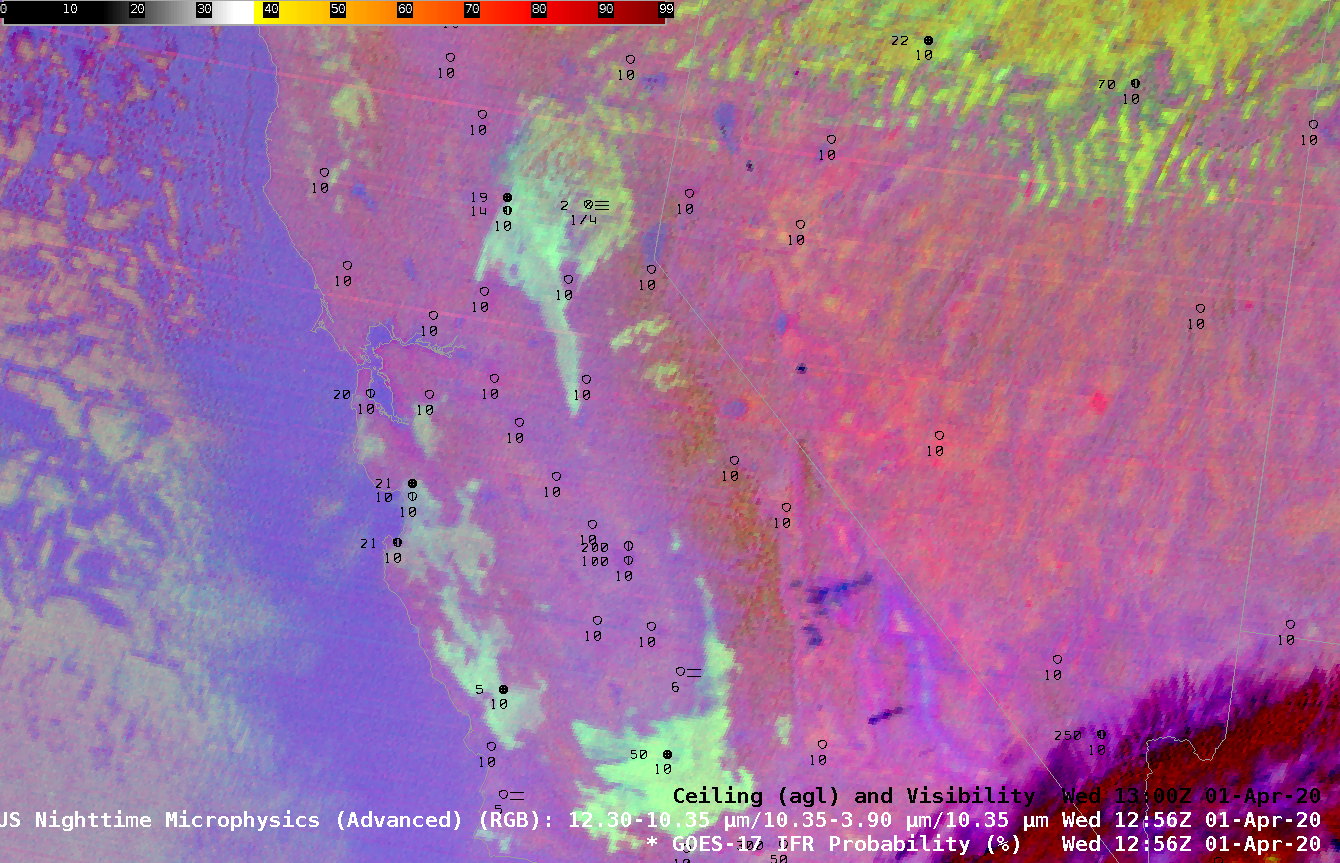
The Nighttime microphysics RGB, shown below, can also be used for qualitative situational awareness. In this case, the region of low clouds over western Washington, around Spokane (where observations show IFR conditions) and to the north, is highlighted as expected (the yellow color that is structured so that individual valleys are obvious). IFR Probabilities north of Spokane are not large, however, suggesting that model simulations there (from the Rapid Refresh model) do not show low-level saturation. (Observations at KOMK — Omak Washington — show near-IFR conditions). Another strength of IFR Probability is that it supplements satellite data where the satellite cannot view low clouds. High clouds to the east of Seattle and Portland are obscuring the view of low clouds in that region where IFR Probabilities are large and where ceilings and visibilities are likely reduced.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}