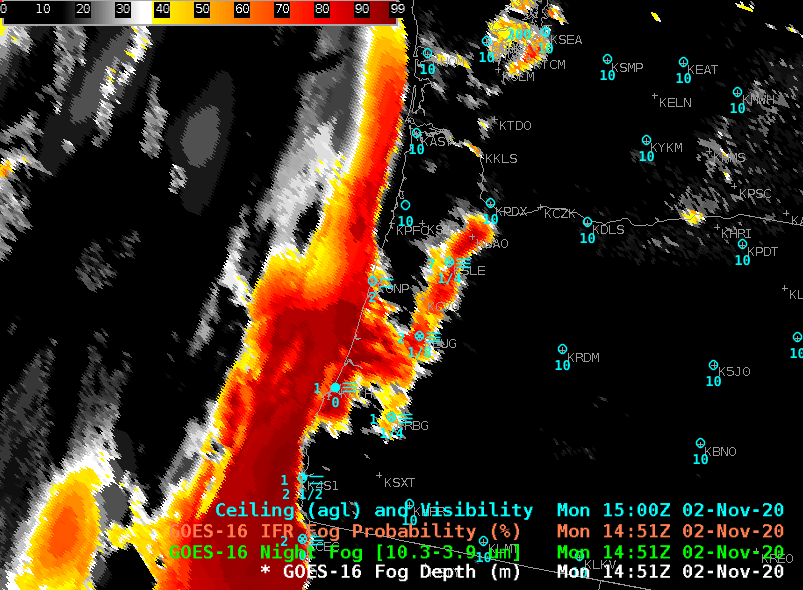
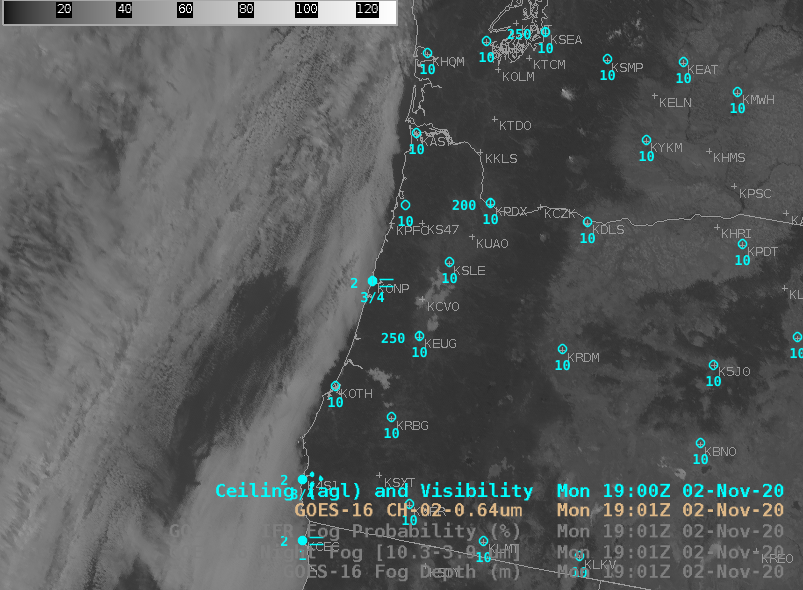
GOES-17 IFR Probability fields, above, show a thin region along the northern shore of Bristol and Kvichak Bays in southwestern Alaska, north of the Aleutian Peninsula, where IFR conditions are likely . Probabilities are highest around King Salmon (PAKN) and Igiugig (PAIG) northeast of King Salmon. Several nearby airports are not reporting observations (PAII — Egegik — just south of King Salmon; PATG –Togiak — along the northern shore of the Bay, east of PAEH (Cape Newenham). IFR probability uses satellite and model information to create an estimate of whether or not IFR conditions will be met in regions where observations are missing. Sometimes, as over Cape Newenham at the end of the animation, high clouds are present and only model data can be used to create the estimate.
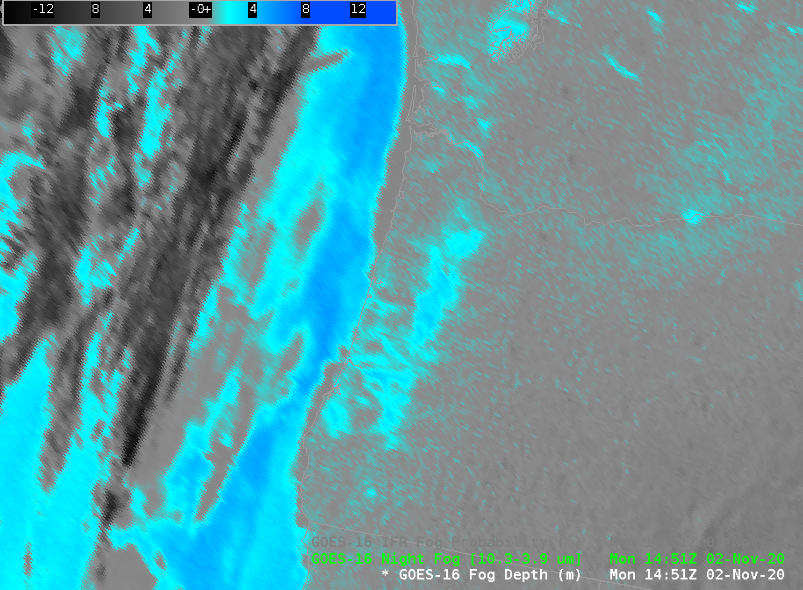
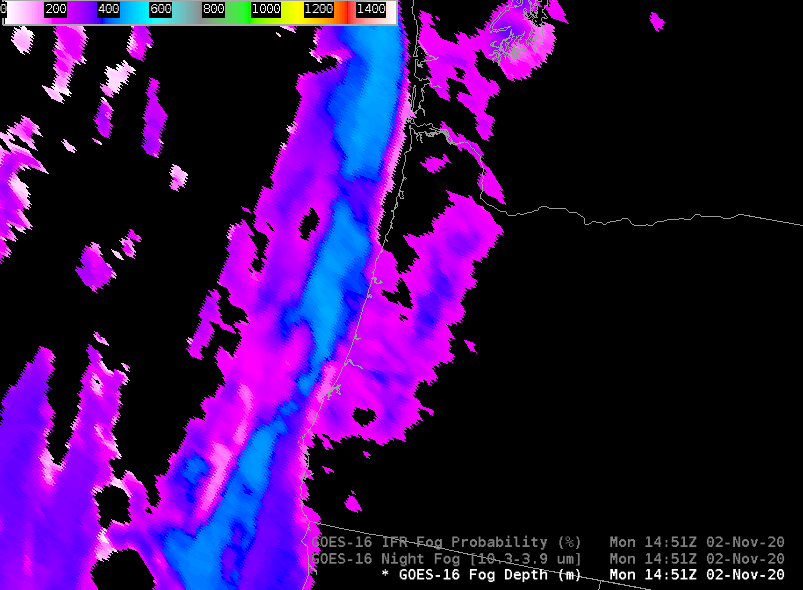
The Night Fog Brightness Temperature Difference field, below, shows that low clouds (made up of water droplets) exist over the same region — but this one product cannot indicate whether the stratus deck observed is reducing visibility near the surface (where aviation interests require that information). The model data that are incorporated into IFR Probability in concert with satellite data allow for a better estimate of where visibility is reduced than do satellite data alone. This is especially important when the presence of high clouds, as at the end of the animation in the western part of this domain, makes it difficult for the satellite to view low clouds.
Toggles at 1000 UTC (above) and 1600 UTC (below) of IFR Probability, Low IFR Probability and Night Fog Brightness Temperature Difference, suggest that the greatest likehihood of reduced visibilities are not along the bay shore, but rather inland along the Kvichak River.
{kind=link}