 |
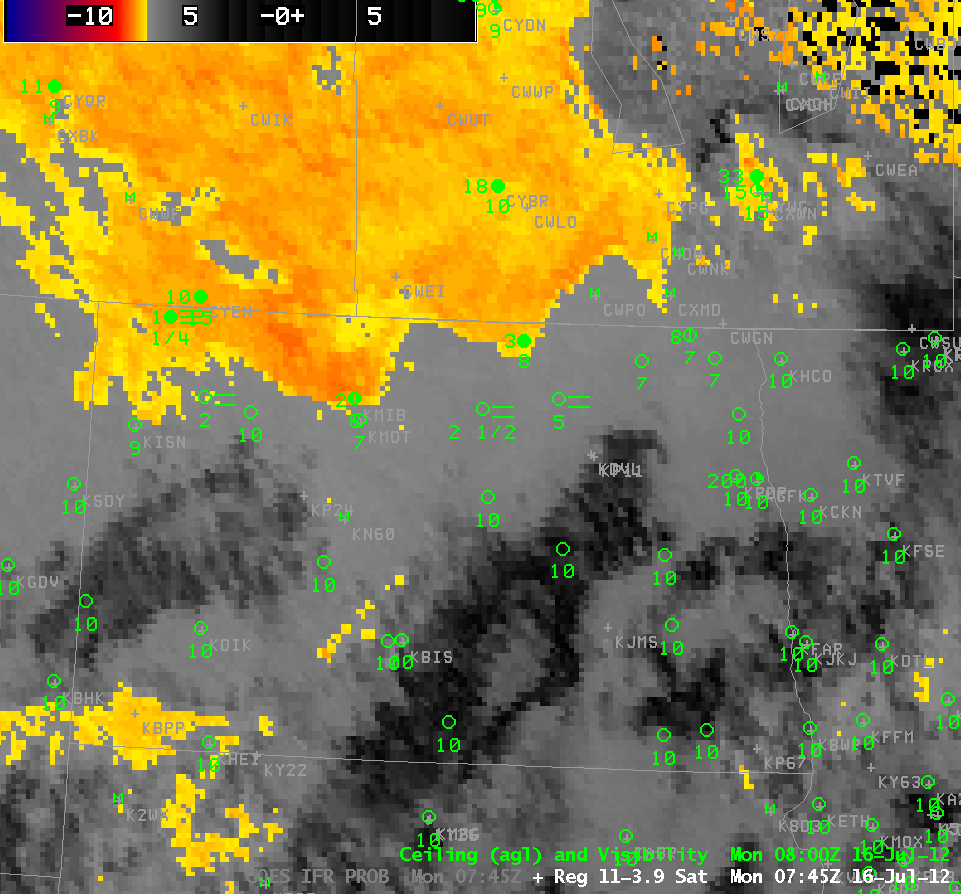
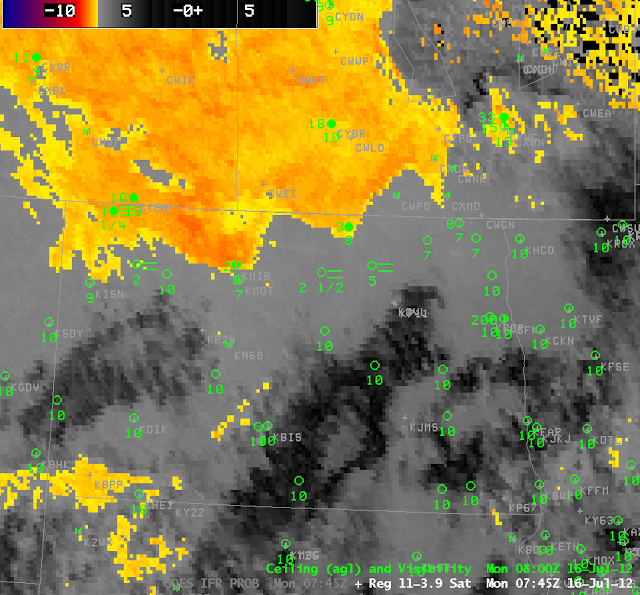
| Brightness Temperature Difference (11 micrometers – 3.9 micrometers) at 0745 UTC on 16 July |
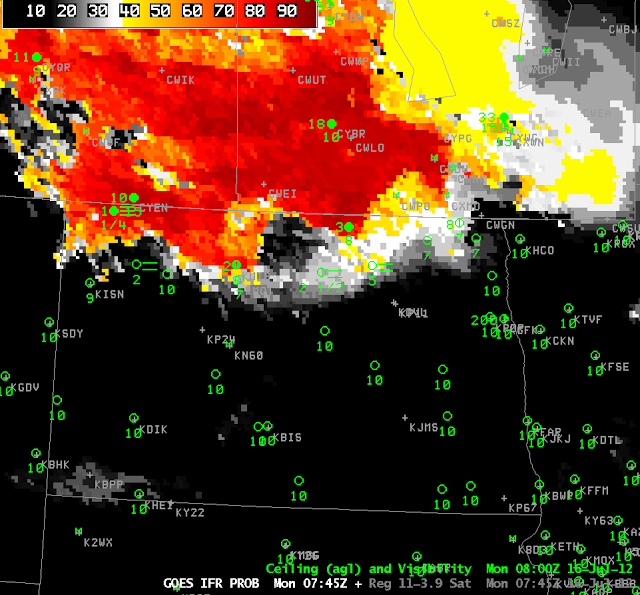 |
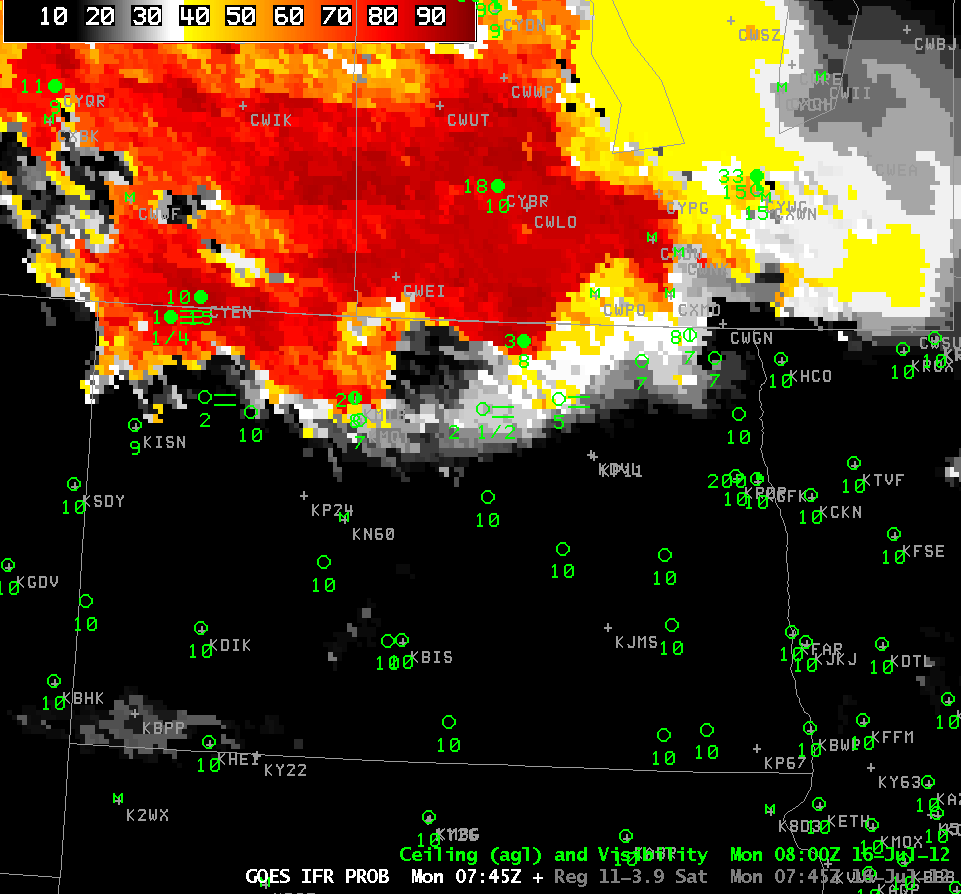
| GOES-R IFR probability product at 0745 UTC on 16 July 2012 |
|
|
The two images above show the ‘traditional’ GOES fog product — the brightness temperature difference between 11 and 3.9 micrometers — at 0745 UTC on 16 July 2012 (top) and the GOES-R IFR probabilities at the same time. In addition, ceilings and visibilities at stations in North Dakota are plotted. Both products accurately capture the fog/low stratus along the North Dakota/Canada border. The IFR probabilities do a better job at suggesting the development of IFR at Rugby, ND (with 2-1/2 mile visibility). The IFR probabilities are also correct over southwestern North Dakota: IFR conditions do not exist there despite the brightness temperature difference.
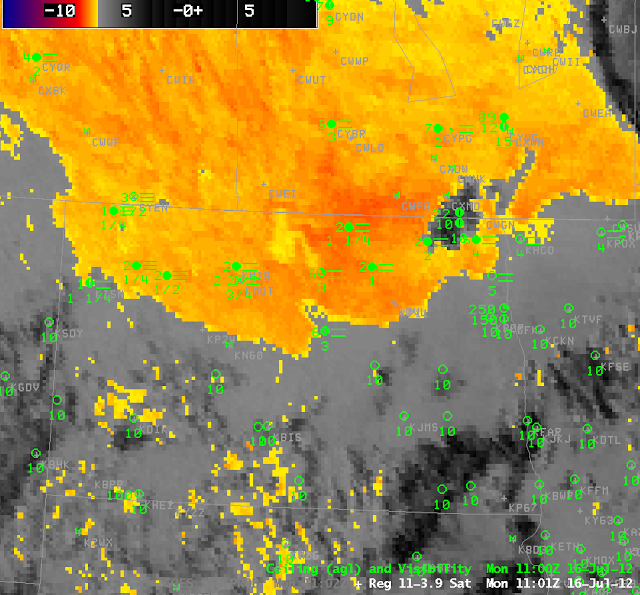 |
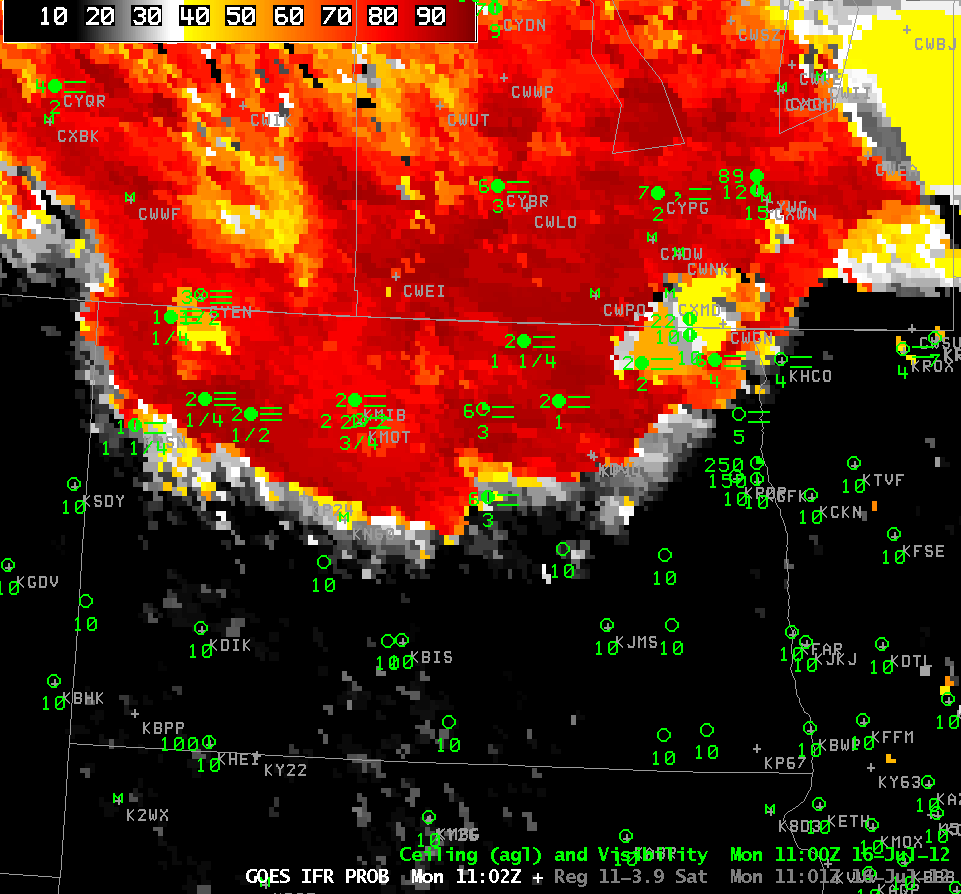
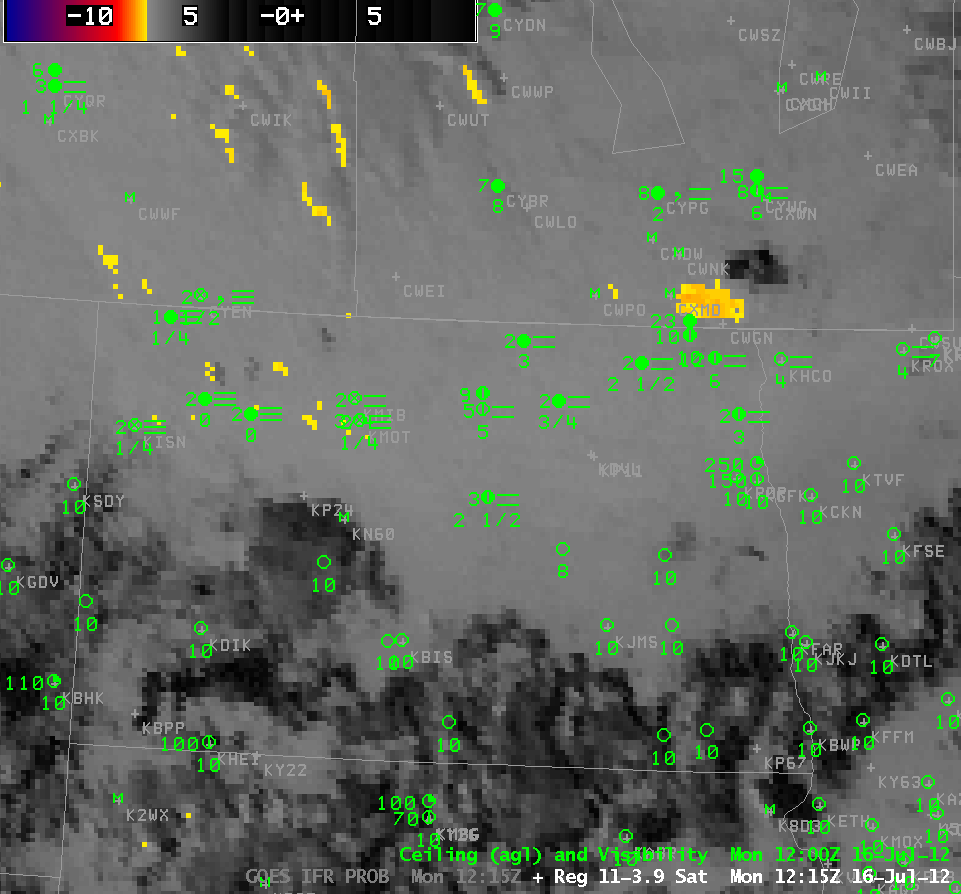
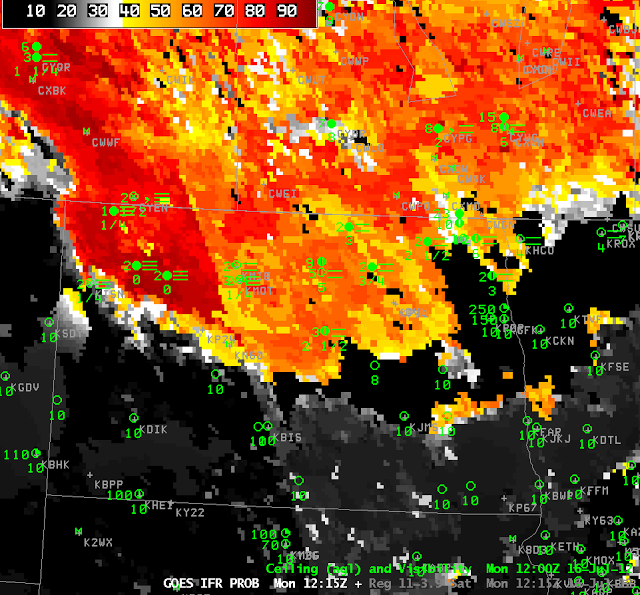
| Brightness Temperature Difference (11 micrometers – 3.9 micrometers) at 1101 UTC on 16 July |
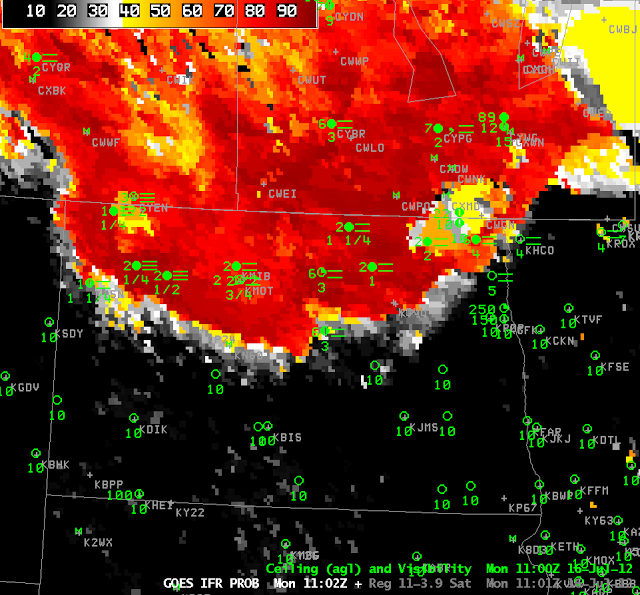 |
| GOES-R IFR probability product at 1102 UTC on 16 July 2012 |
At 1100 UTC (above), both products accurately portray the existence of fog/low stratus over north central North Dakota, but the traditional brightness temperature difference product continues to suggest fog/low stratus over southwestern North Dakota, where IFR conditions do not exist, and where the IFR probability has little signal.
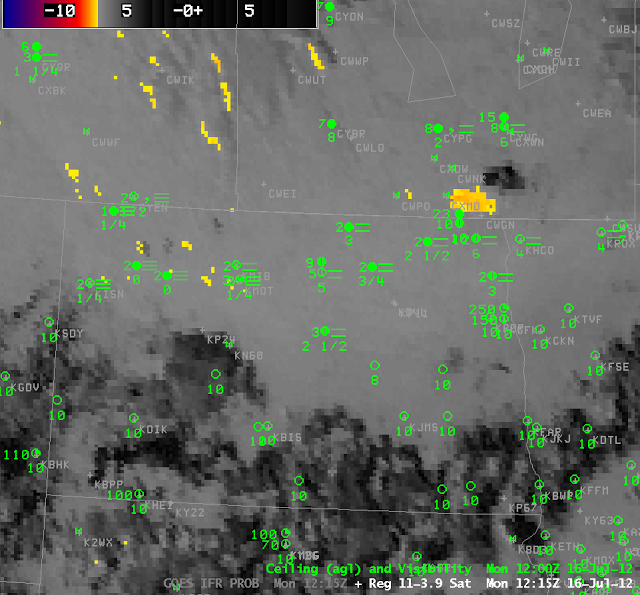 |
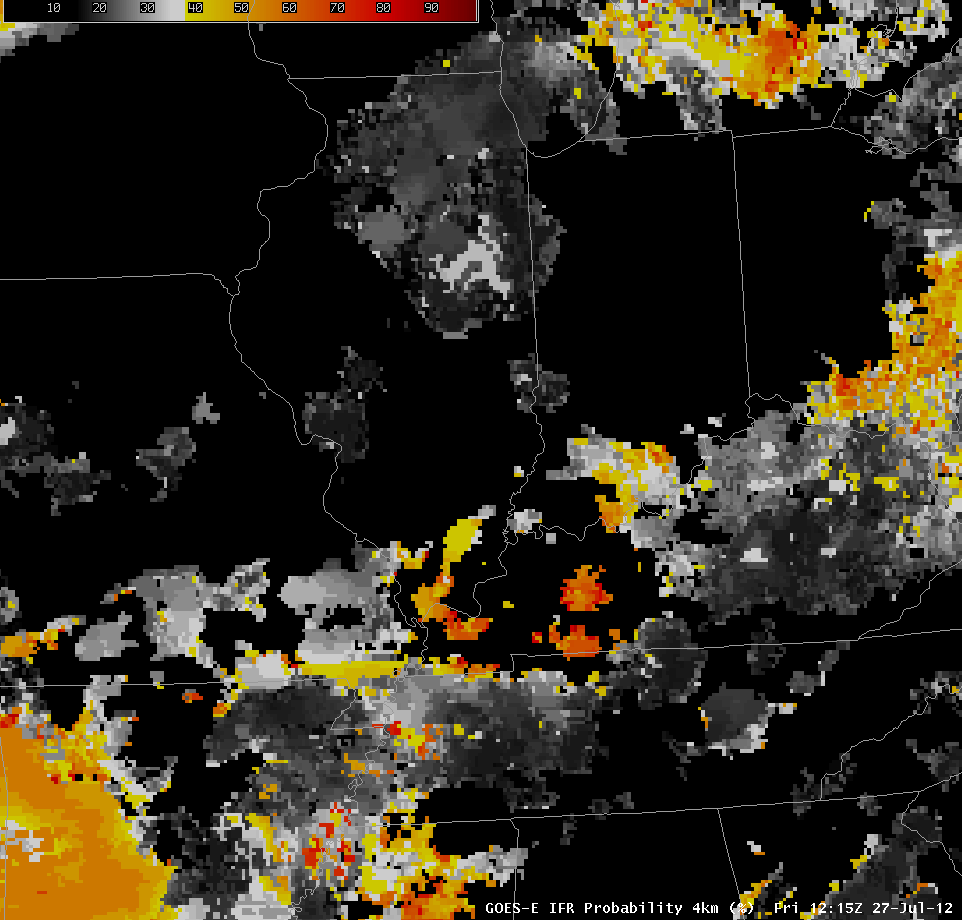
| Brightness Temperature Difference (11 micrometers – 3.9 micrometers) at 1215 UTC on 16 July |
 |
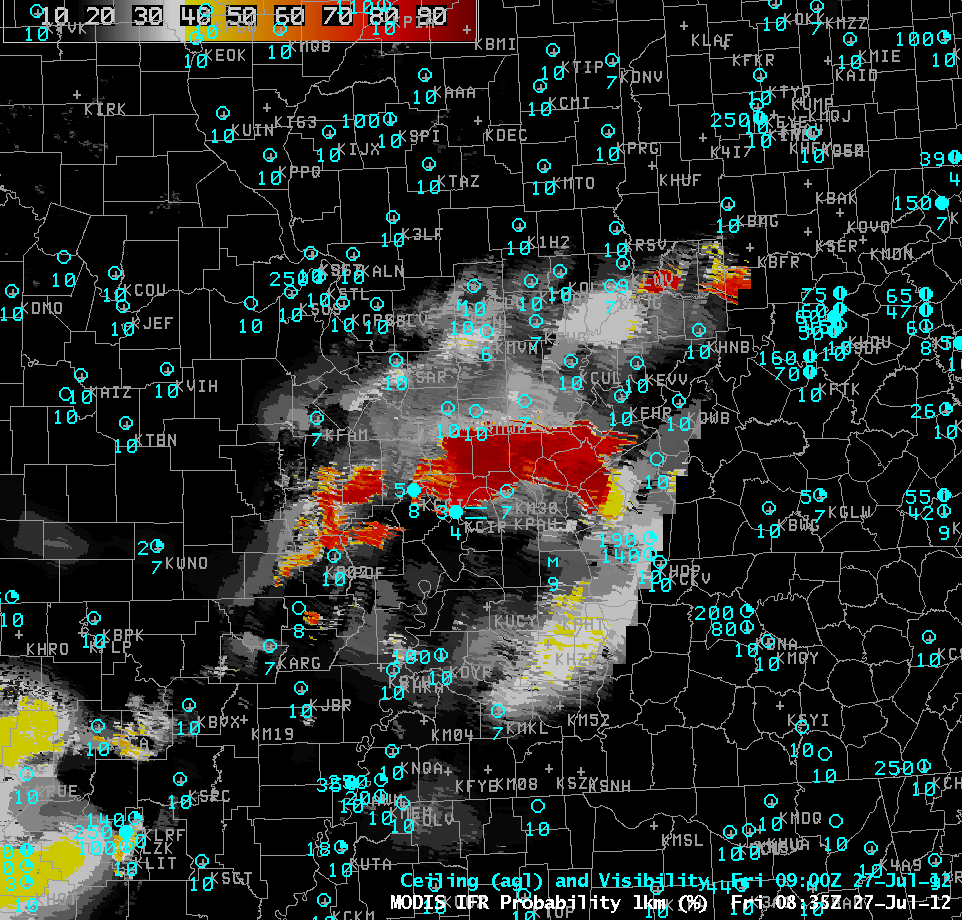
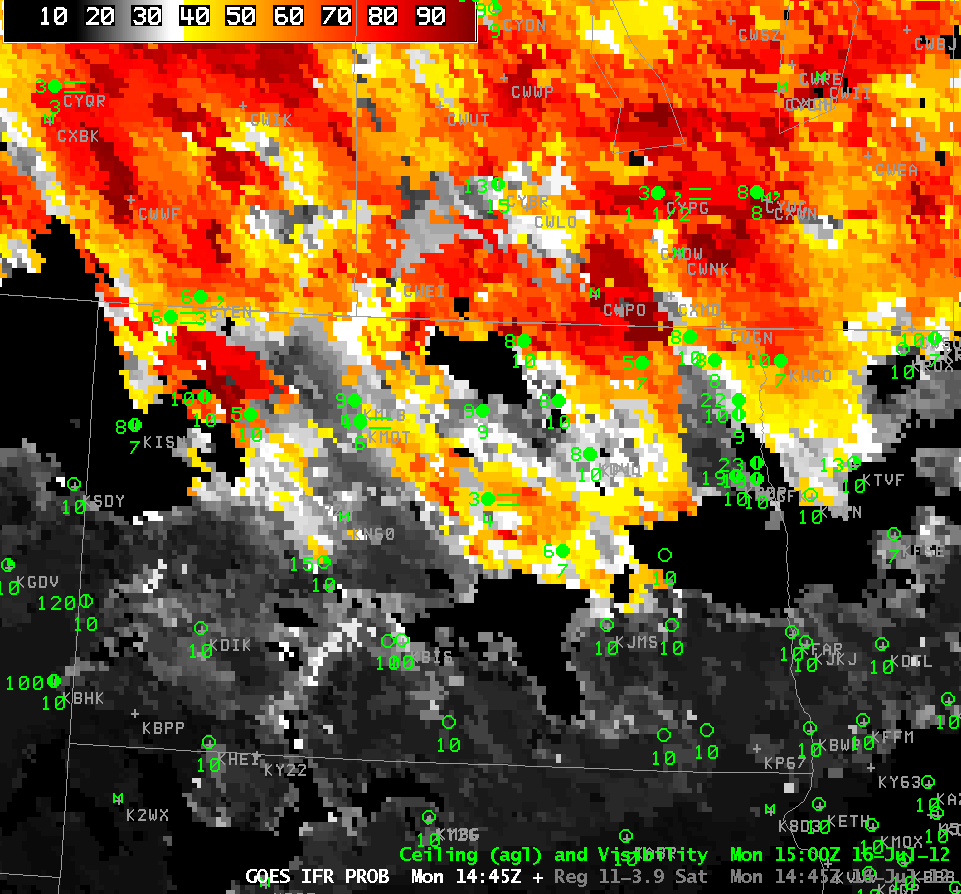
| GOES-R IFR probability product at 1215 UTC on 16 July 2012 |
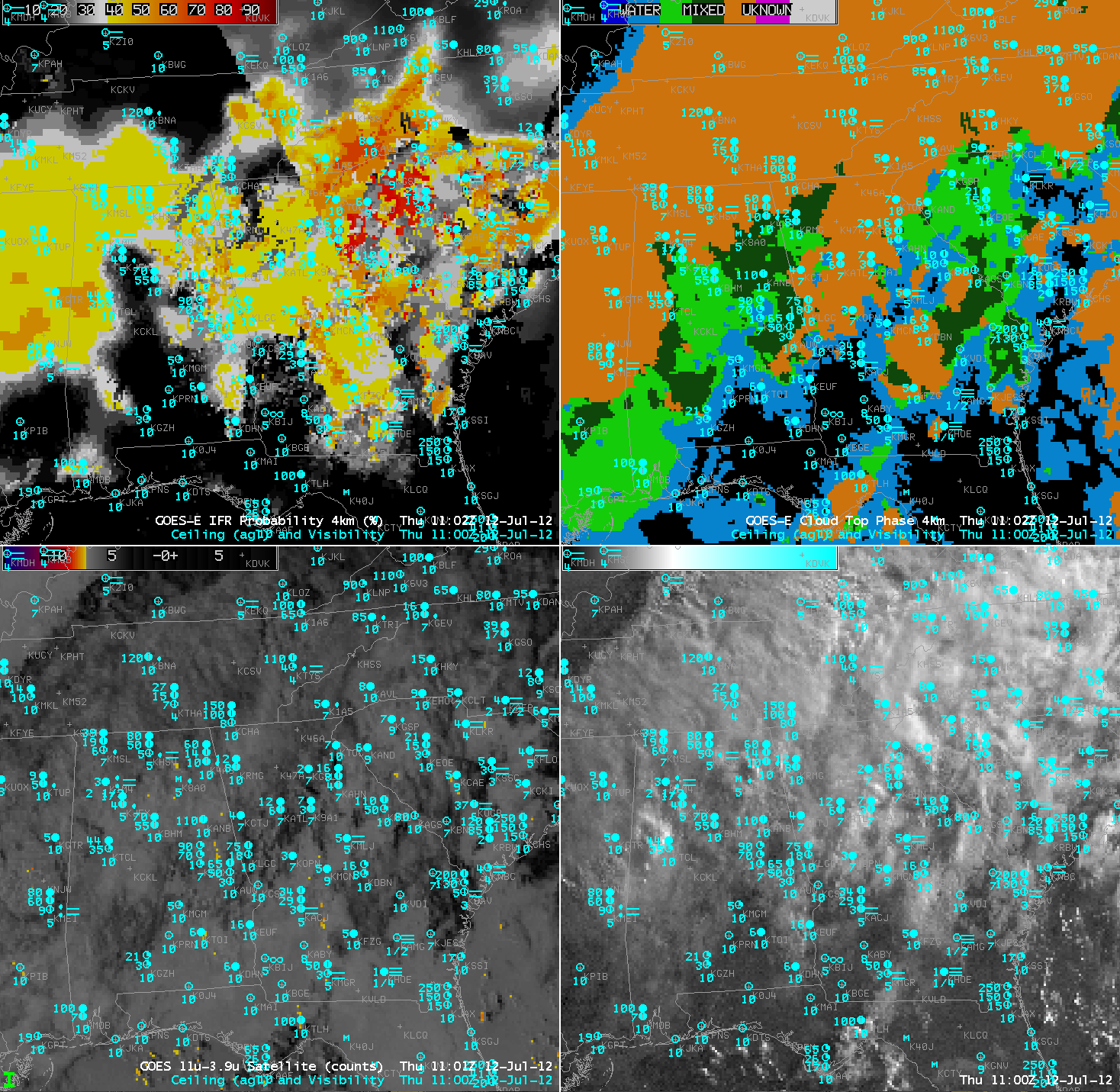
When the sun rises, reflected solar 3.9-micrometer radiation causes the brightness temperature difference between 11 and 3.9 micrometers to flip sign, and the color enhancement used at night loses value in day. In contrast, the GOES-R IFR probability maintains a robust signal from nighttime through twilight to daytime (the terminator is visible in the IFR probability image at 1215 UTC 16 July, above, running north-northwest from south-central North Dakota to western north-central North Dakota). Higher IFR probabilities continue to overlap the region where IFR conditions are reported. By 1445 UTC (below), the region of IFR conditions is breaking apart; stations that persist in reporting IFR conditions (or near IFR) are within the highest IFR probability in the field — Minot and Harvey in ND, Estevan in Saskatchewan and Portage in Manitoba.
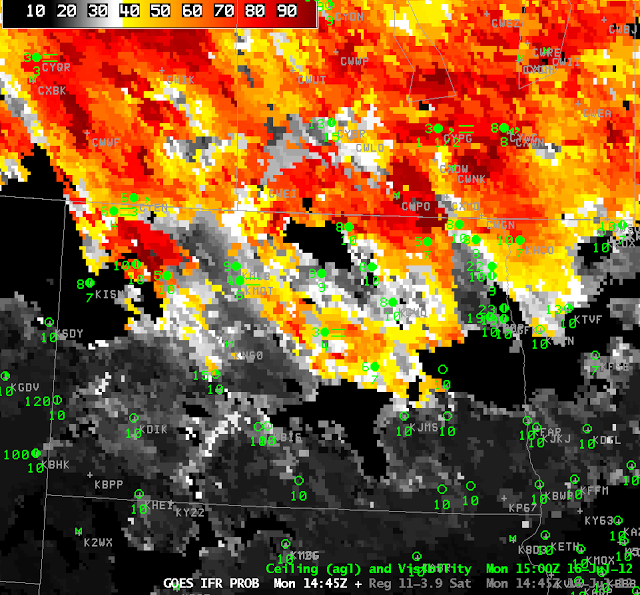 |
| GOES-R IFR probability product at 1445 UTC on 16 July 2012 |