GOES-16 Night Fog Brightness Temperature Difference (10.3 µm – 3.9 µm) and Nighttime microphysics RGB, 0901 UTC on 11 May 2021, along with observations of ceilings (AGL) and visibility
The toggle above compares Night Fog Brightness Temperature difference fields at 0901 UTC on 11 May over Colorado and surrounding states. Both fields can be used to identify regions of stratus/low stratus — and by inference, fog. At this time, however, it is a challenge to use these satellite-only products because of widespread mid/upper-level clouds over eastern Colorado, Kansas and Nebraska. Note how the blue/cyan regions in the Night Fog Brightness Temperature Difference field show through into the Nighttime Microphysics RGB; the green component of that RGB is the Night Fog Brightness Temperature Difference field.
On this day, the high clouds prevented the Brightness Temperature Difference alone from highlighting regions of fog. IFR Probability fields, below from the same time, show that this field better outlined the region of low clouds/fog over the High Plains. The field incorporates both Night Fog Brightness temperature difference fields — to determine where stratus clouds might be — and Rapid Refresh model estimates of low-level moisture — to determine where saturation might be occurring. Where the satellite detects stratus clouds, and where the Rapid Refresh model suggests low-level saturation, high IFR Probability (as over southeastern Colorado) results, in accordance with, on this day, observations. If high clouds are present (as over much of eastern Colorado), IFR Probability can still occur because the Rapid Refresh data shows low-level saturation. Note also that the extensive cloud cover over Kansas and Nebraska — elevated stratus — does not have a strong signal in the IFR Probability fields.
This product blends the strengths of satellite observations and the strength of model estimates.
GOES-16 Night Fog Brightness Temperature Difference (10.3 µm – 3.9 µm) and IFR Probability, 0901 UTC on 11 May 2021, along with observations of ceilings (AGL) and visibility
GOES-17 IFR Probability from 1220 – 1710 UTC on 6 April 2021 (Click to enlarge)
GOES-17 IFR Probability fields, above, show a large region of high probabilities to the south and west of Alaska over the Bering Sea. This region of low clouds is encroaching onto shore and demonstrates how the field could be used to predict the onset of lower ceilings. The Night Fog brightness temperature difference animation, below, spanning the same times, documents how high clouds can make mask the satellite detection of low clouds. The animation also shows how the signal changes when the Sun rises (mot noticeable after about 1600 UTC). The Night Fog Brightness Temperature difference field is a component of the Nighttime Microphysics RGB; if the Night Fog Brightness Temperature difference cannot detect low fog because of high clouds, then the Nighttime Microphysics RGB similarly will not detect low clouds.
GOES-17 Night Fog Brightness Temperature Difference (10.3 µm – 3.9 µm) fields, 1220 UTC – 1710 UTC on 6 April 2021 (click to enlarge).
The toggles below of Night Fog Brightness Temperature difference and GOES-17 IFR Probability at 1400 UTC (below) and 1620 UTC (bottom) underscore how the IFR Probability field can give useful information in regions underneath high clouds. If you were scheduled to be on a boat in the Bering Sea on this day, for example, would you expect any visibility?
Toggle between GOES-17 IFR Probability and GOES-17 Night Fog Brightness Temperature Difference (10.3 µm – 3.9 µm) fields, 1400 UTC on 6 April 2021 (click to enlarge). Surface observations of ceilings and visibilities at 1600 UTC are also plotted.Toggle between GOES-17 IFR Probability and GOES-17 Night Fog Brightness Temperature Difference (10.3 µm – 3.9 µm) fields, 1620 UTC on 6 April 2021 (click to enlarge). Surface observations of ceilings and visibilities at 1600 UTC are also plotted.
The imagery below, from webcams at Togiak (at 1700 UTC) (source), show the low clouds along the coast.
Webcam image from Togiak AK, 1715 UTC 6 April 2021, looking northWebcam image from Togiak AK, 1715 UTC 6 April 2021, looking west
GOES-17 IFR Probability fields, 1120 – 2110 UTC on 7 March 2020 (Click to enlarge)
GOES-17 IFR Probability fields over southwestern Alaska and the Aleutians, shown above, characterize several areas of likely IFR conditions on 7 March. One region is over the Bering Sea, north of the Aleutians. This is a region where multiple cloud layers prevent the satellite from viewing low clouds. However, the Rapid Refresh model simulation there does show saturation at low levels; large values of IFR Probability are the result. When model fields control the IFR Probability values, there is little pixel-to-pixel variability and field has a uniform look. This example also shows values from two different models — the Alaska version of the Rapid Refresh (over most of the domain) and the GFS model over parts of Asia.
A second region of high IFR Probabilities is over land in southwest Alaska. There, an absence of high clouds means that satellite detection of low clouds occurs. There is good agreement between IFR Probability fields and observations of ceilings and visibility. For example, note how IFR Probability decreases around PAUN (Unalakeet) as the visibility improves and ceilings lift.
The toggle between the Night Fog Brightness temperature difference and IFR Probability field at 1210 UTC, below, reveals differences as well. The Brightness Temperature Difference field shows uniformity (except for a path of high clouds centered on Dillingham). IFR Probability fields show that the low clouds and reduced visibilities are not so widespread: note the conditions near McGrath and Sleetmute — IFR Probabilities are low, and IFR conditions are not present.
GOES-17 IFR Probability fields and Night Fog Brightness Temperature Difference (10.3 µm – 3.9 µm), 1220 UTC on 7 March 2021 (Click to enlarge)
The animation of Night Fog Brightness temperature below demonstrates challenges in using the field. When high clouds overspread a region, the low cloud signal is lost; perhaps because the fog lifts, and perhaps not. The signal is also lost as the sun rises: the emissivity differences that drive the difference field at night are overwhelmed by solar reflectance as the sun rises.
GOES-17 Night Fog Brightness Temperature Difference (10.3 µm – 3.9 µm) field, 1220 – 1830 UTC on 7 March 2021 (Click to enlarge)
GOES-16 Brightness Temperature Difference (10.3 µm – 3.9 µm), 0831 – 1331 UTC 1 March 2021 (Click to enlarge)
GOES-16 Night Fog Brightness Temperature Difference (BTD) fields (10.3 µm – 3.9 µm), above, show different cloud types in and around South Carolina before and through sunrise on 1 March 2021. Before sunrises, low clouds — stratus and fog — are characterized by blue/cyan/aqua colors in this enhancement. The positive brightness temperature difference arises because of emissivity differences in small cloud droplets for shortwave (3.9 µm) and longwave (10.3 µm) infrared radiation. Negative brightness temperature differences occur for higher clouds.
The presence of high clouds interferes with the satellite’s ability to view low clouds. Although one can infer a low cloud’s presence from an animation (and the assumption that the cloud doesn’t substantively change when a high cloud overspreads it), it’s a bit more difficult to extrapolate the cloud base from the cloud top behavior. In other words: Are the low clouds highlighted actually fog? Note also how the BTD enhancement changes as reflected solar radiation around sunrise starts to overwhelm any differences attributable to emissivity.
IFR Probability fields, shown below, combine the strength of satellite detection of low clouds with the strength model depiction of low-level saturation. IFR Probabilities will be quite high where satellites detect low clouds, and where Rapid Refresh model simulations show near-surface saturation. But if high clouds are in the way, IFR Probabilities can still be large if the Rapid Refresh model shows low-level saturation. This is occurring off the coasts of South and North Carolina. Note also: IFR Probability fields aren’t changing radically as the sun rises.
GOES-16 IFR Probability, along with surface observations of ceilings and visibility, 0831 UTC – 1326 UTC 1 March 2021 (Click to enlarge)Night Fog Brightness Temperature Difference, Night time microphysics RGB, GOES-16 IFR Probability, 1001 UTC on 1 March 2021 (Click to enlarge)
The toggle above compares the Night Fog BTD with the Night time microphysics RGB (an RGB that takes as its green component the Night Fog BTD), and the GOES-16 IFR Probability fields at 1001 UTC on 1 March, shortly before sunrise. There is an obvious relationship between the RGB color and the regions of low clouds highlighted in the BTD by blue/cyan/aqua colors; the color of the RGB is tempered by the cloud temperature, however: the blue component of the RGB is the longwave infrared brightness temperature, and that is different over the ocean compared to over southwestern Georgia (for example). Note also how IFR Probability shows large values under the deep clouds over northwest South Carolina/western North Carolina.
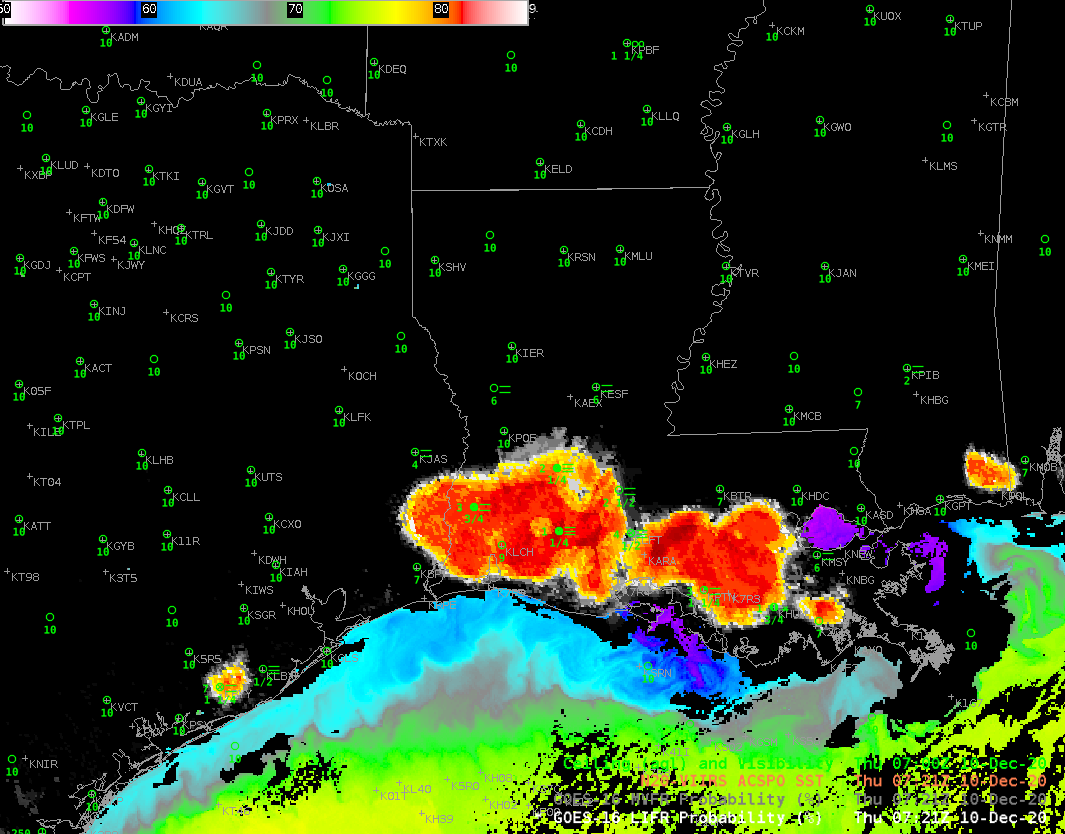
Why is fog occurring offshore? Moist air over South Carolina is moving over relatively cool shelf waters, and cooled to its dewpoint; advection fog is the result. The toggle below shows surface dewpoints in the low 60s over coastal South Carolina. Sea-surface temperatures, shown at bottom from VIIRS at 0700 UTC and GOES-16 at 1300 UTC, show cool shelf waters with surface temperatures in the 50s (F).
GOES-16 IFR Probability with surface observations of ceilings/observations and surface METARs, 1001 UTC on 1 March 2021 (Click to enlarge)NOAA-20 ACSPO VIIRS Sea Surface Temperatures (0701 UTC) and GOES-16 SST Temperatures (1301 UTC), click to enlarge
GOES-17 Clean Window (10.3 µm) infrared imagery, 1000 – 1510 UTC on 19 February 2021 (Click to enlarge)
Clean Window infrared imagery from GOES-17, above, shows a cyclonic storm making landfall over the southeast Alaska peninsula. Multiple cloud levels can be inferred from this animation, and satellite detection of low clouds (and stratus), as reported in sparse METAR observations, is a challenge. Note also the occasional striping that suggests the Loop Heat Pipe on GOES-17 is not cooling the satellite (The Cooling Timeline — every 15 minutes for a Full Disk, is being used at the start of the animation).
In particular, the GOES-based ‘Night Fog ‘ Brightness Temperature Difference field, below, commonly used alone, and as part of the night time microphysics RGB, does not show a consistent signal (cyan in the enhancement) associated with low clouds/stratus/fog — because higher clouds (grey in the applied enhancement) are interfering with the view.
Night Fog Brightness Temperature Difference (10.3 µm – 3.9 µm), 1000 UTC – 1510 UTC on 19 February 2021 (click to enlarge)
GOES-17 IFR Probability combines satellite information with Rapid Refresh model (resolution: 11 km) predictions of low-level saturation. More recent model data are incorporated every hour; you might notice that fields adjust slightly at the top of the hour as that happens.
IFR Probability fields show that the likelihood of IFR conditions are extending southward along the coastal range with time, and increasing in the Inside Passage as well. Note also how IFR Probability is generally larger near mountain tops: it is created with knowledge of topography
GOES-17 IFR Probability fields, 1000 – 1510 UTC on 19 February 2021 (Click to enlarge)
GOES-16 IFR Probability, 0646 – 1501 UTC on 19 January 2021 (Click to enlarge)
GOES-16 IFR Probability fields, above, show a gradual expansion southward of the regions of highest probability of reduced visibility. As the fields encroach over stations, visibilities and ceilings are reduced: there is a very good relationship between observed IFR conditions and enhanced IFR Probabilities. This field could be used on 19 January to predict the onset of low ceilings and reduced visibilities.
You will note that there are hourly changes to the IFR Probability fields. Rapid Refresh model data used in the computation of IFR Probability is updated each hour when a more recent model simulation is incorporated into the data. You can also identify regions where satellite data are not used because high clouds are preventing a satellite view of low stratus: there are regions where IFR probability is an unpixelated mostly uniform field.
The Night Time microphysics RGB for the same period, shown below, also highlights the region of low clouds as a cyan/yellow feature slowly moving southward. In principle, this field is only showing you that stratus clouds are present, because information about the cloud base (supplied by the Rapid Refresh model in IFR Probability fields) is lacking.
The challenge of using the Night Time Microphysics field is also apparent near the end as the Sun rises and the color associated with the stratus clouds changes.
GOES-16 Night Time Microphysics RGB, 0646 – 1501 UTC, 19 January 2021 (Click to enlarge)
The toggle below compares the GOES-16 IFR Probability field and the GOES-16 Night Time Microsphysics RGB at 1201 UTC. A cirrus shield along the southern boundary of the IFR Probability field is hindering the ability of the Night Time Microphysics RGB there to detect low clouds.
GOES-R IFR Probability and Night Time Microphysics, 1201 UTC on 19 January 2021 (Click to enlarge)
GOES-16 versions of the GOES-R Fog/Low Stratus products are now available in Real Earth (see this post also). (The GOES-17 versions will become available when deemed operational). At present, only the CONUS domain is rendered into Real Earth. The animation below can also be accessed at this link.
GOES-16 IFR Probability, 1451 – 1516 UTC on 5 January 2021 (click to enlarge)
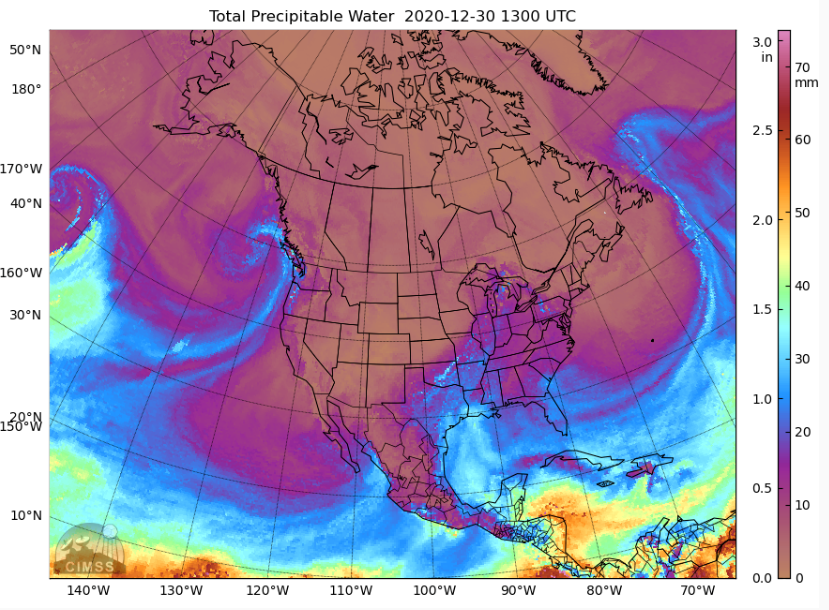
MIMIC Total Precipitable Water, 1300 UTC on 30 December 2020 (Click to enlarge)
A large storm moving ashore in British Columbia (0900 UTC Map), shown above in MIMIC Total Precipitable Water (from this site), was accompanied by widespread high clouds over much of the Pacific Coast of the United States. The 1511 UTC image, below, shows GOES-16 “clean window” (10.3 µm) infrared imagery, with high clouds apparent.
GOES-16 “Clean Window” infrared imagery (10.3 µm) at 1511 UTC on 30 December 2020
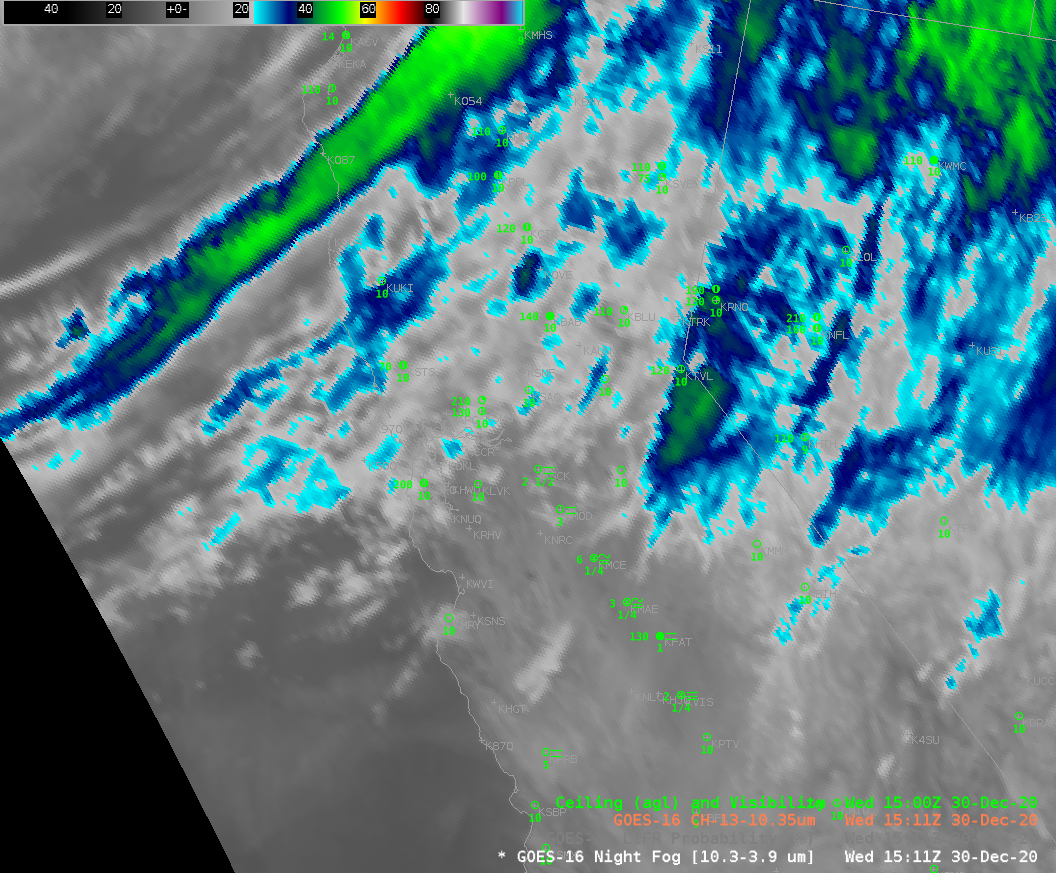
Satellite-only detection of fog/low clouds will be challenged on this day by the abundance of high clouds that block the satellite’s view of low stratus decks. Indeed, the ‘Night Fog’ brightness temperature difference field, below, allows for only periodic glimpses of what is happening near the surface. There are indications of fog — but it is challenging even in the animation to determine the horizontal extent of the fog regions.
GOES-16 ‘Night Fog’ Brightness Temperature Difference (BTD, 10.3 µm – 3.9 µm), 1111 – 1516 UTC on 30 December 2020, along with surface observations of ceilings and visibilities
GOES-16 Low IFR Probability fields, below (note: GOES-17 IFR Probability fields are still undergoing testing in preparation for their being deemed operational) highlight two regions of visibility restrictions: One is off the coast of central California, and a another is a narrow ribbon of reduced visibilities in the Central Valley. This case highlights a strength of IFR Probability fields: You get a useful and consistent signal even if high clouds are blocking the satellite view of low clouds. This is because Rapid Refresh Model estimates of low-level saturation are incorporated into the Probability fields.
GOES-16 Low IFR Probability fields, 1116 – 1511 UTC, 30 December 2020, along with surface observations of ceilings and visibilities (Click to enlarge)
GOES-16 IFR Probability Fields, 1056 UTC – 1546 UTC, on 22 December 2020 (Click to enlarge)
IFR Probability fields from early on 22 December 2020, above, show a region of High Probabilities over northwest Wisconsin, northeastern Minnesota and northwestern Ontario. In general, the observations of IFR conditions (ceilings between 1000 and 3000 feet, visibilities between 1 and 3 miles) match well with the highest IFR Probability. The western edge of the field has characteristics that suggest it becomes more model-defined (in this case, the Rapid Refresh model that supplies the low-level saturation information) with time: the field from western Wisconsin up through Minnesota becomes less and less pixelated with time, as satellite information is lost due to the incursion of higher clouds.
Note also: Lake Superior, warmer than the overlaying atmosphere, is diagnosed as having low probabilities of IFR conditions.
Brightness temperature Difference fields, shown below for the same times, have historically been used to detect low clouds. However, there is little correlation between the fields and the observations of IFR conditions for two principle reasons: Brightness Temperature Difference fields alone do not give information on the cloud base, and IFR conditions require low cloud bases; Higher clouds impede the detection of low-level clouds associated with IFR conditions, and high clouds are overspreading this scene.
The animation below also shows how the Brightness Temperature Difference signal is lost as increasing amounts of solar reflectance become present as the sun rises.
GOES-16 Night Fog Brightness Temperature Difference (10.3 µm – 3.9 µm), 1056 UTC – 1546 UTC, on 22 December 2020 (Click to enlarge)
The toggle below shows GOES-16 IFR Probability and the Night Fog Brightness Temperature Difference (10.3 – 3.9) at 1301 UTC, before sunrise. There are significant regions of low clouds/fog over northeastern Minnesota that have little signal in the brightness temperature difference field — but there is a strong signal there in the IFR Probability field.
GOES-16 IFR Probability and GOES-16 Night Fog Brightness Temperature Difference (10.3 µm – 3.9 µm), 1301 UTC on 22 December 2020 (Click to enlarge)
By 1501 UTC, below, when the sun is above the horizon, reflected solar radiation means that the Night Fog Brightness Temperature Difference default enhancement is no longer appropriate to detect low clouds. However, IFR Probability continues to outline regions of low clouds and fog.
GOES-16 IFR Probability and GOES-16 Night Fog Brightness Temperature Difference (10.3 µm – 3.9 µm), 1501 UTC on 22 December 2020 (Click to enlarge)
GOES-R IFR Probability fields blend the strengths of satellite detection of clouds with the strengths of model detection of low-level saturation. In regions of high clouds, where the satellite cannot view low clouds (over northwest Wisconsin, for example), model data nevertheless gives a useful signal. Note also the lower IFR Probabilities over Ontario where low clouds are prevalent. Here, model data allows IFR probabilities to screen out regions of elevated stratus, which clouds are not so important as far as surface visibility restrictions go.
GOES-16 Low IFR Probability fields, 0406 – 1651 UTC, 10 December 2020 , along with surface observations of ceilings and visibility (Click to enlarge)
High Pressure (link), cold air, and proximity to warm Sea Surface Temperatures (image here, ACSPO SSTs from the Direct Broadcast Antenna at CIMSS) meant dense fog over southwestern Louisiana. The animation above shows Probabilty of Low IFR Conditions from 0400 UTC through sunrise. Low IFR Probability fields originate near Lake Charles and Franklin before consolidating into one large field over southern Louisiana. Surface observations of ceilings and visibilities also indicate dense fog.
An after-effect of the landfall of Hurricanes is the destruction of webcams that can be used to monitor fog, as noted in the Area Forecast Discussion from WFO Lake Charles, below, from 441 AM CST on 10 December. IFR Probability products in AWIPS combine model predictions of low-level saturation and satellite observations of low cloud to mitigate this loss of information. Regions where low IFR Probability values are high are likely regions that would have dense fog on webcams.
Night Fog Brightness Temperature difference (10.3 µm – 3.9 µm) fields, below, also show the region of stratus clouds. But this satellite-only product does not contain information on how dense the fog is underneath the cloud top (or even if the stratus cloud is also fog). The combination of model data and satellite data by IFR Probability products gives more information than satellite data alone.
GOES-16 Night Fog Brightness Temperature Difference (10.3 µm – 3.9 µm), 0406 – 1651 UTC on 10 December 2020 (Click to enlarge)
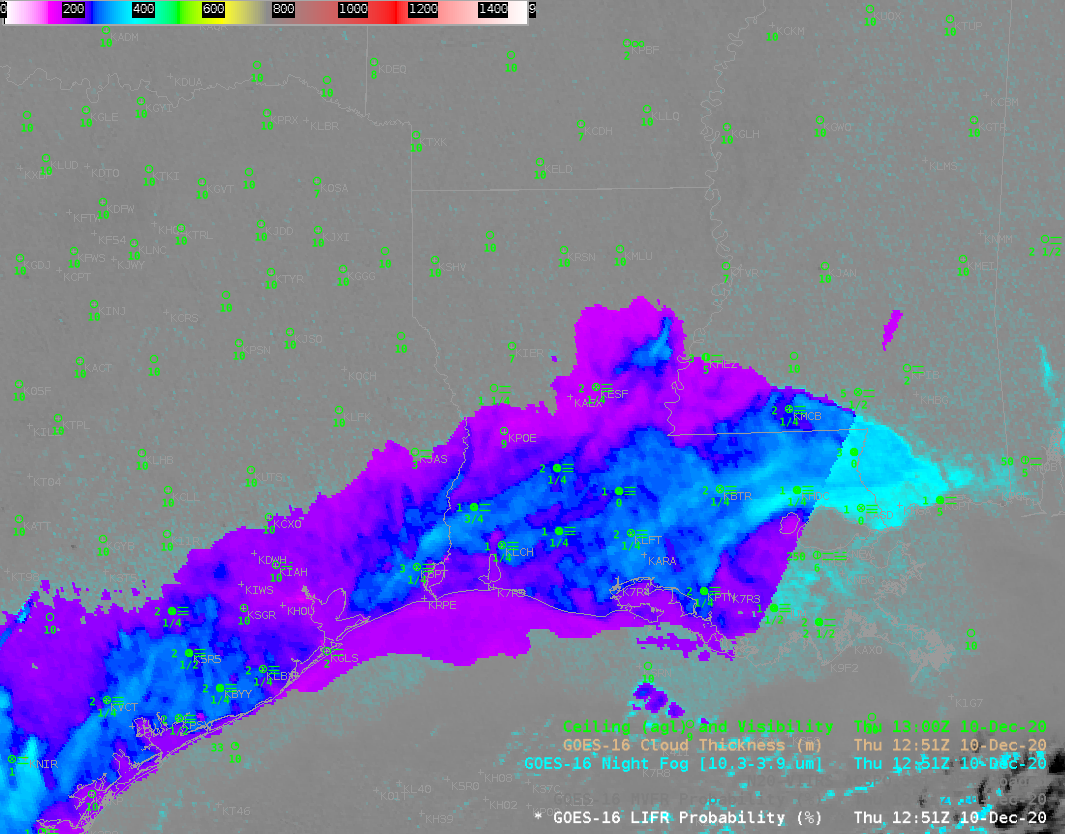
The suite of IFR Probability products includes a GOES-R Cloud Thickness field, shown below overlain on top of a Night Fog Brightness Temperature Difference field. Cloud Thickness is not computed in the 90-120 minutes surrounding sunrise, and the terminator is apparent in the image below, where the Night Fog Brightness Temperature Difference becomes apparent. The thickest cloud (nearly 400 m) is northwest of Lake Ponchartrain. That is where the fog should dissipate last, perhaps.
GOES-R Cloud Thickness field, 1251 UTC, displayed on top of the Night Fog Brightness Temperature Difference field (10.3 µm – 3.9 µm) from the same time (Click to enlarge)
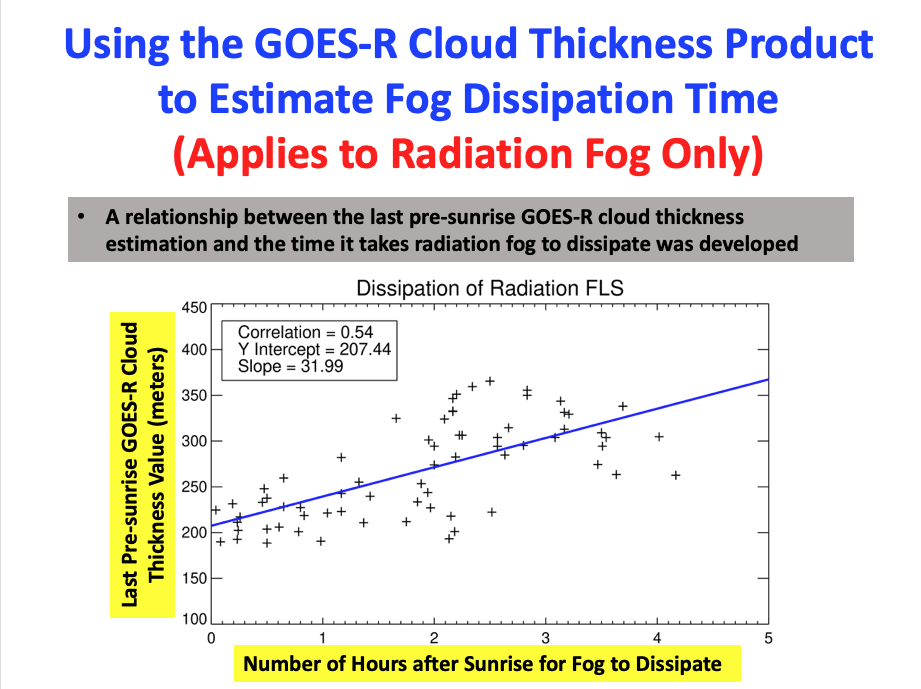
The scatterplot below can be used to estimate when radiation fog might dissipate. It relates the last pre-sunrise observation of GOES-R Cloud Thickness, as shown above, to the number of hours until burn-off. A value of almost 400 m suggests a burnoff nearly four hours after the image above: 1651 UTC. The Thickness field also suggests fog dissipation will be more rapid over southwestern Louisiana than over regions near Lake Ponchartrain. Animations of the Night Fog Brightness Temperature, above, and the visible imagery, below, show that the estimate was a good one on this day.
GOES-16 Band 2 (0.64 µm) visible imagery, 1336 – 1651 UTC on 10 December 2020 (Click to enlarge)
The IFR Probability products include Low IFR Probability, shown above, IFR Probability, and Marginal VFR (MVFR) Probability, in addition to Cloud Thickness. The toggle below, from 0906 UTC, shows that MVFR Probability and Low IFR Probability fields were co-located. As expected, probability of MVFR conditions are greater than probabilities of Low IFR conditions.
GOES-R Low IFR and MVFR Probability, 0906 UTC on 10 December 2020 (Click to enlarge)
Added: Lake Charles WFO also tweeted out this excellent image of a Fog Bow as the fog dissipated!


{kind=link}
{kind=link}