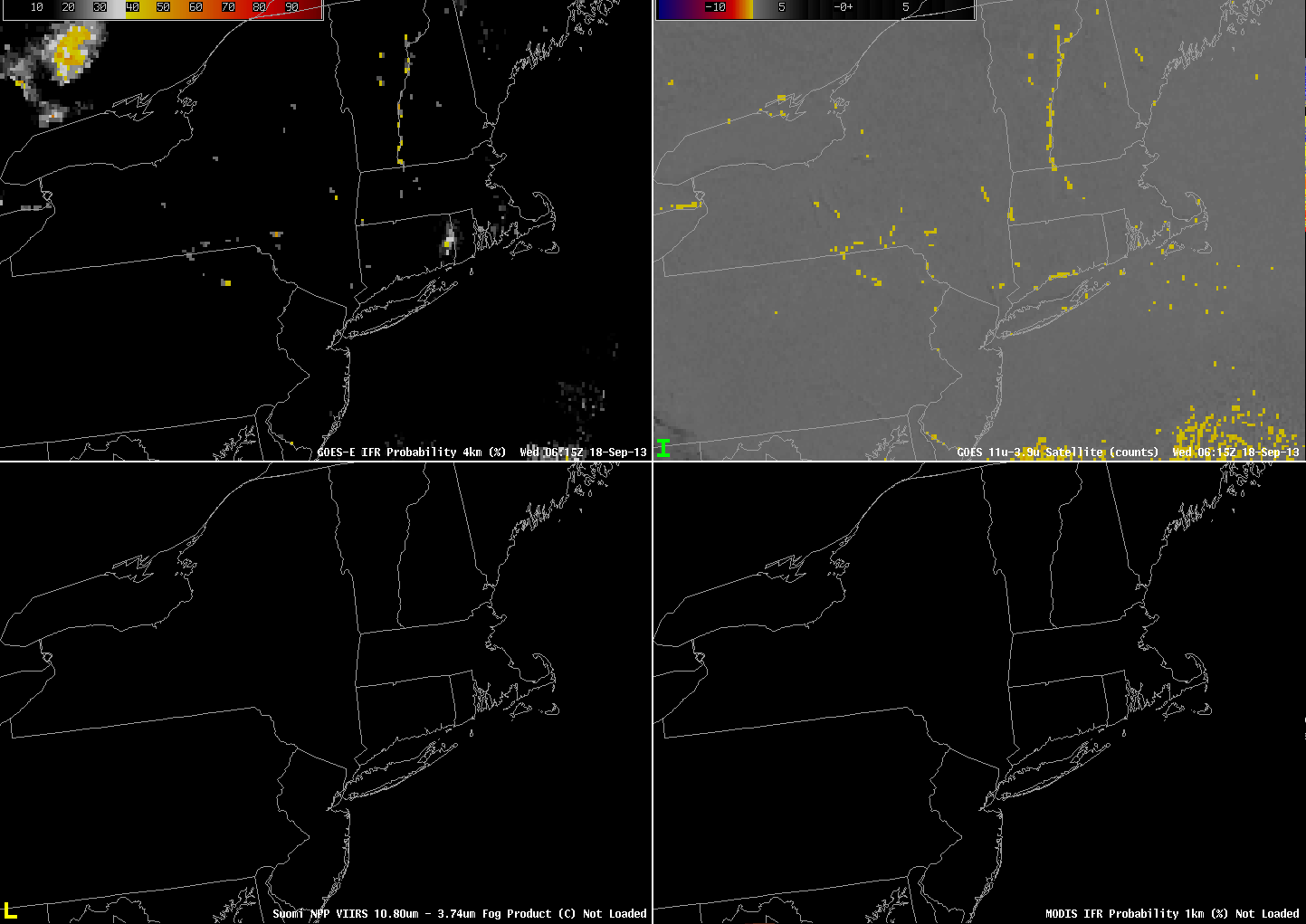
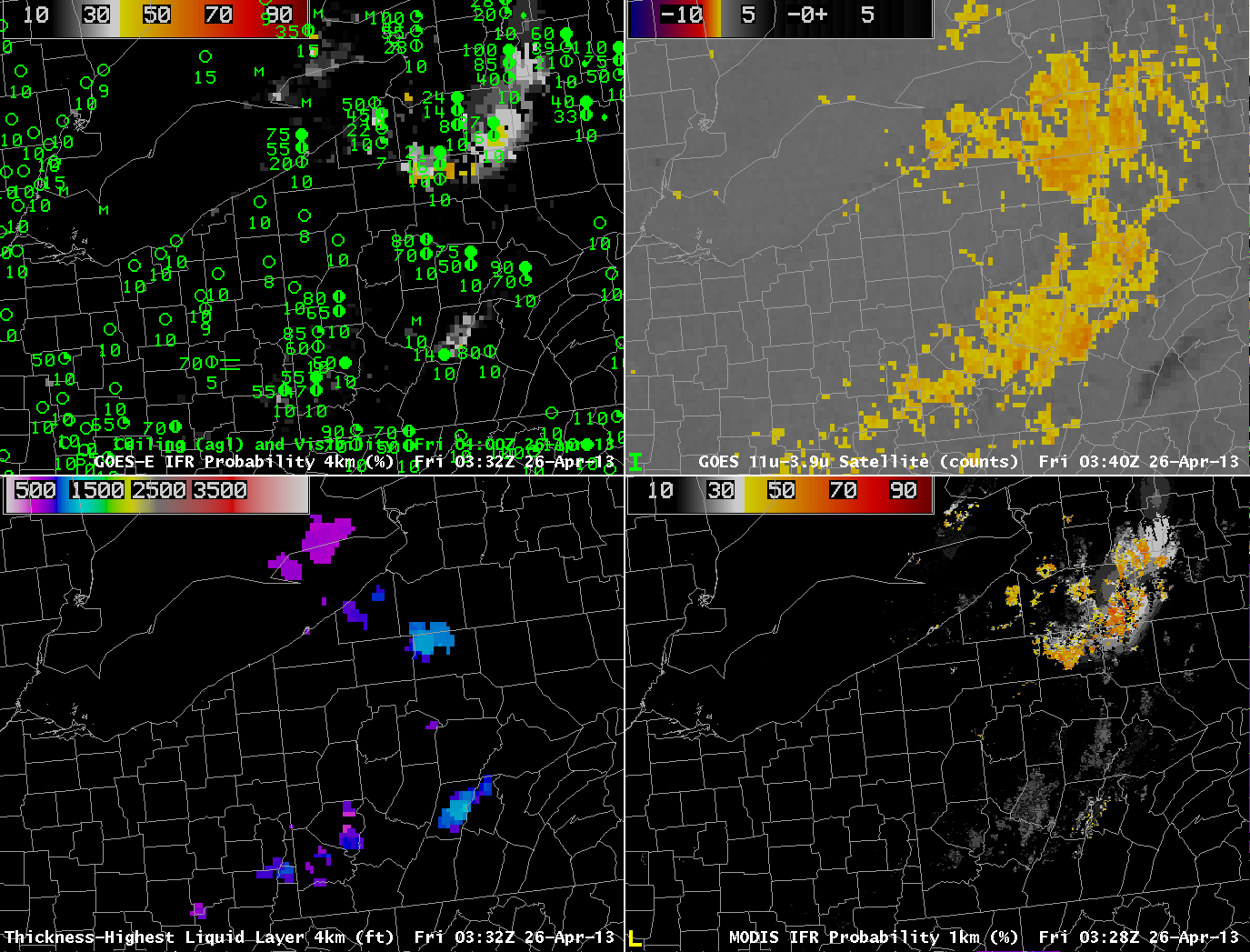
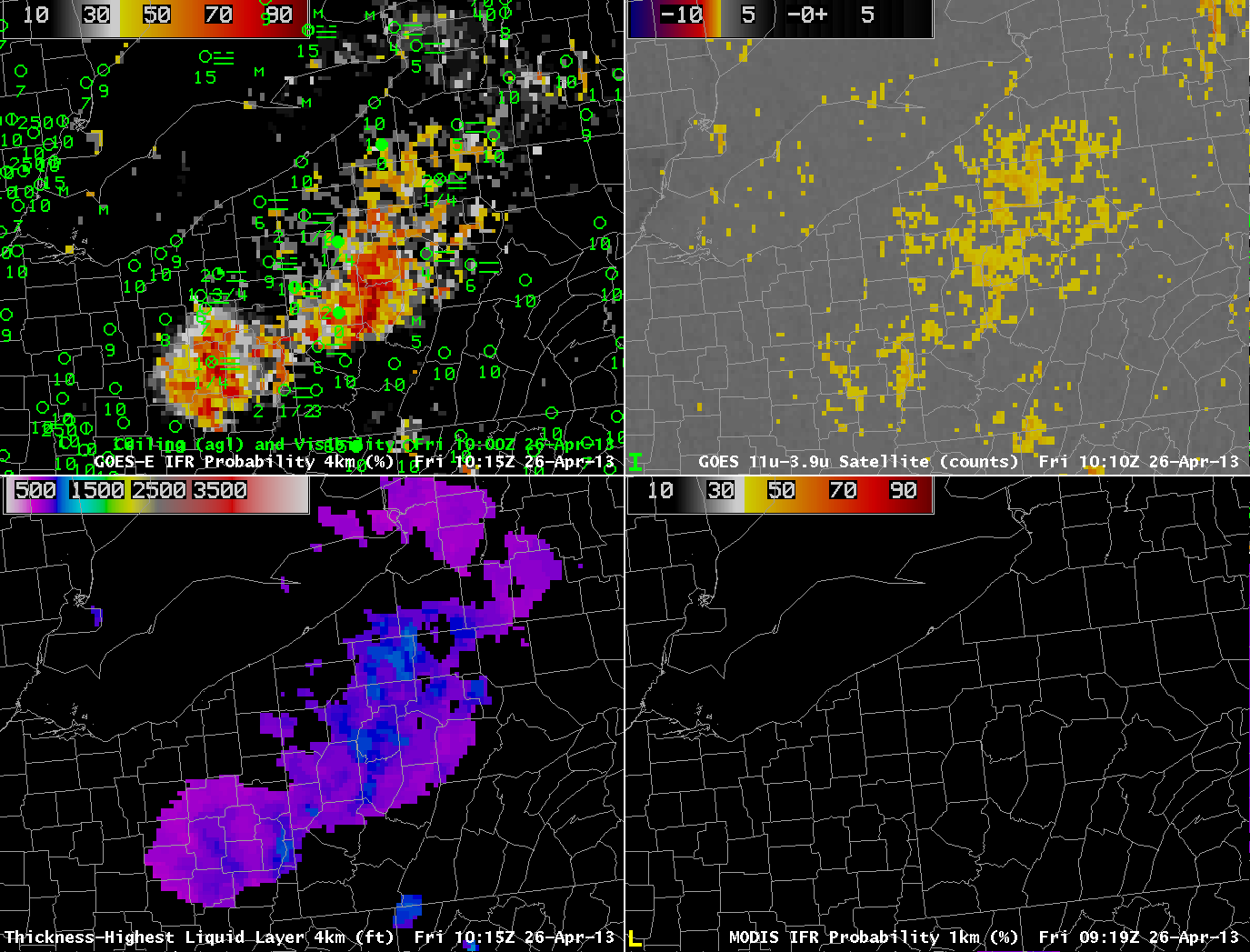
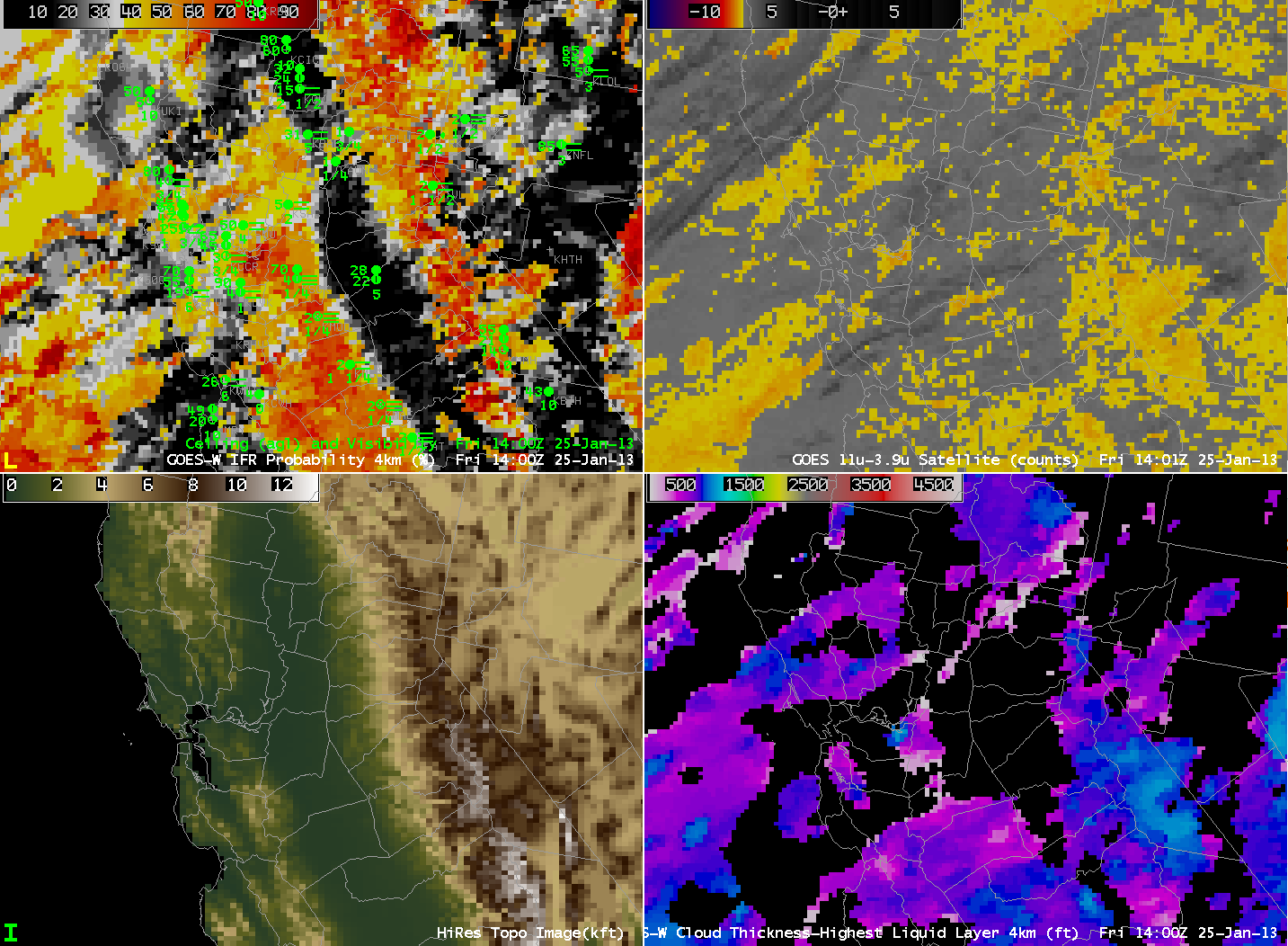
GOES-R IFR Probability (Upper Left), GOES-East Brightness Temperature Difference (Upper Right), Suomi/NPP Brightness Temperature Difference (Lower Left), MODIS-based IFR Probability (Lower Right), all imagery at 0615 UTC on 18 September 2013 (click image to enlarge)
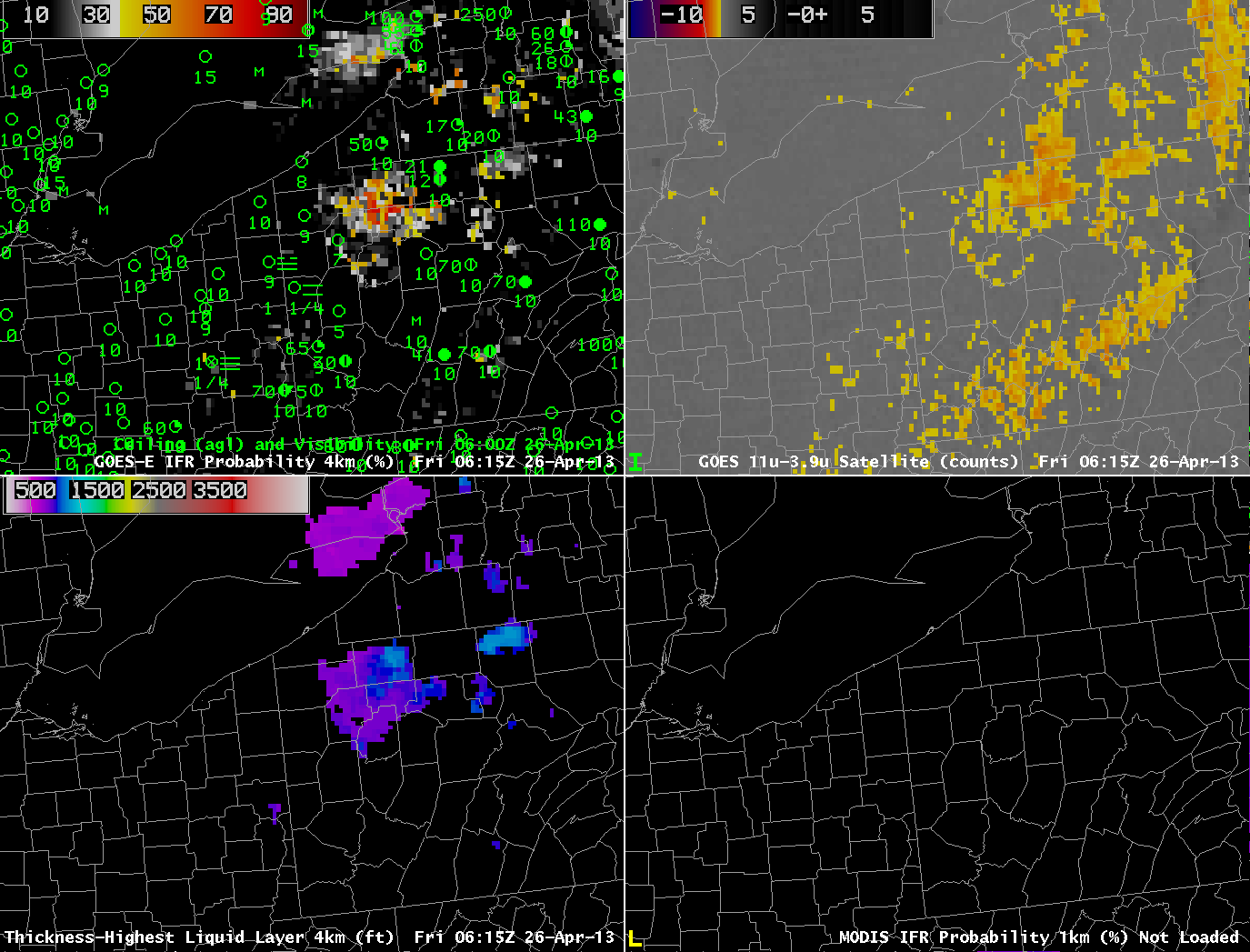
Nominal GOES resolution for the Brightness Temperature Difference product that is used in the GOES-R IFR Probability is 4 km at the sub-satellite point, and it worsens as you move into mid-latitudes. Rapid Refresh Model resolution is even coarser than the satellite. When fog is forming in narrow valleys, then, there can be a significant lag in the time from when it starts to form to when the satellite data, and the satellite/model fused product, detects it. In the 0615 UTC image above, for example, only a few pixels of strong GOES-detected Brightness Temperature Difference, and enhanced IFR Probabilities, exist. In the 0630 UTC image, below, there has been little change in the GOES-based imagery. However, the Suomi/NPP data at the time, at 1-km resolution, suggests fog is forming in many of the river valleys of Pennsylvania, but it is still sub-gridscale as far as GOES can detect.
GOES-R IFR Probability (Upper Left), GOES-East Brightness Temperature Difference (Upper Right), Toggle between Suomi/NPP Day/Night band imagery and Suomi/NPP Brightness Temperature Difference (Lower Left), MODIS-based IFR Probability (Lower Right), all imagery at ~0630 UTC on 18 September 2013 (click image to enlarge)
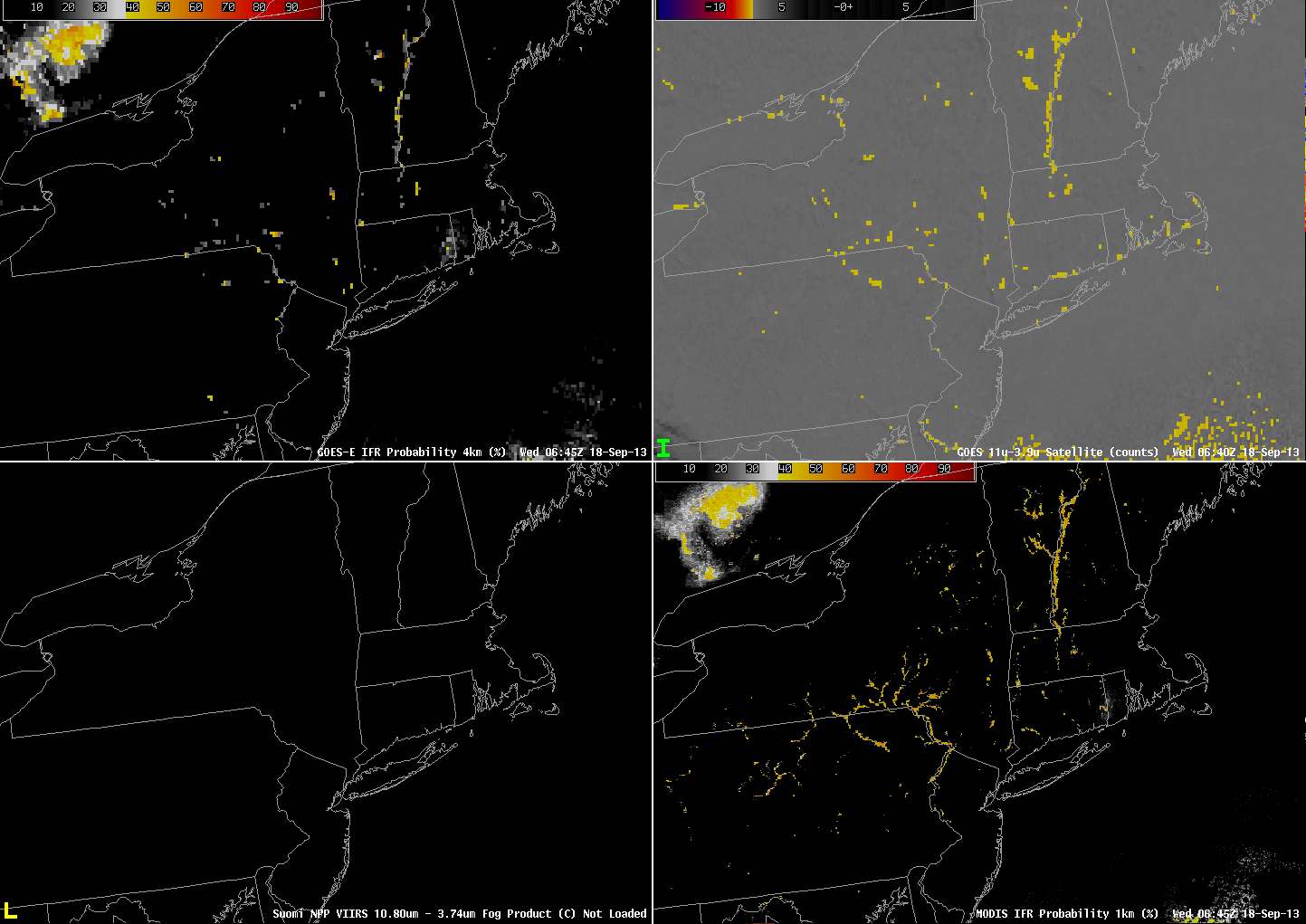
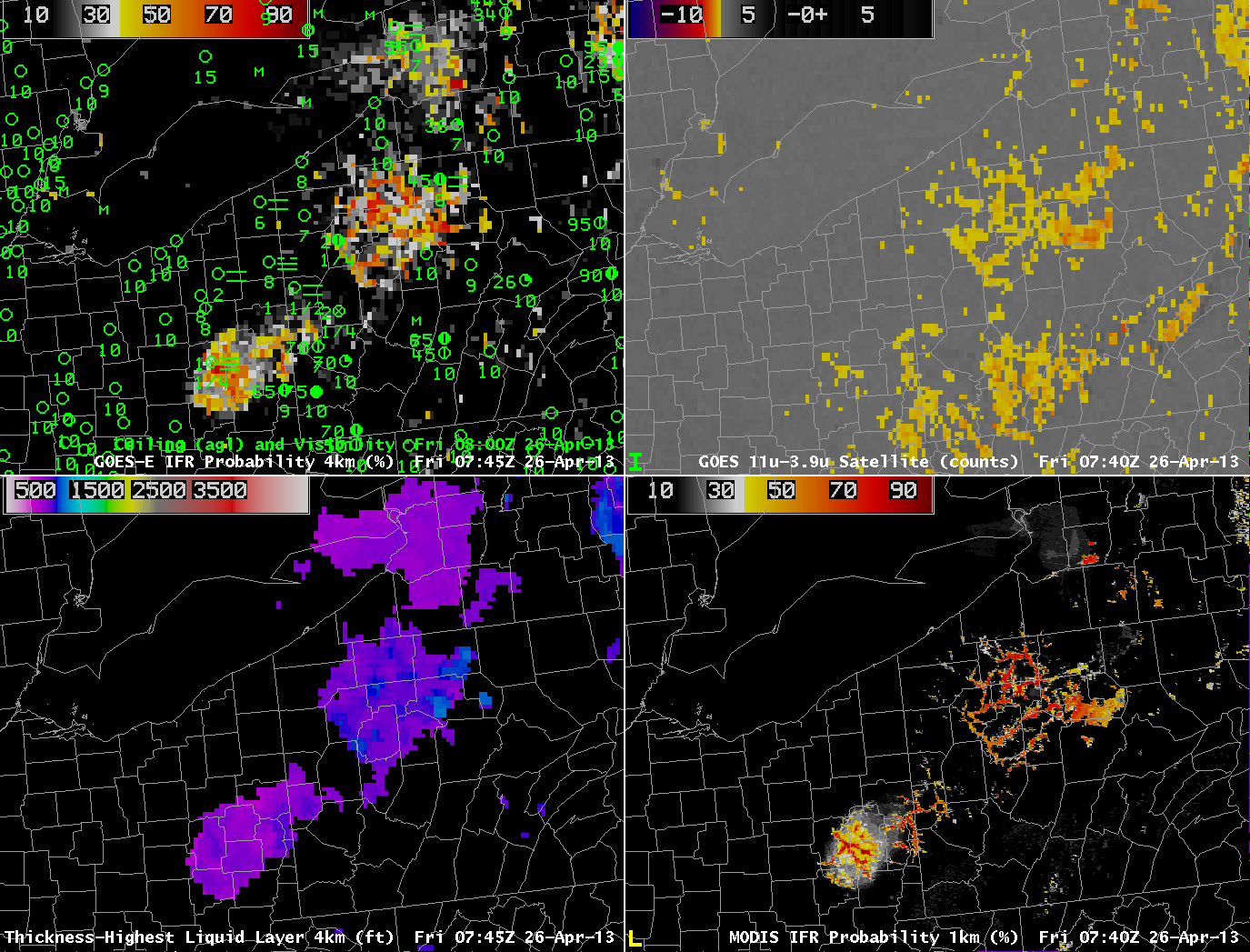
GOES-R IFR Probability (Upper Left), GOES-East Brightness Temperature Difference (Upper Right), Suomi/NPP Brightness Temperature Difference (Lower Left), MODIS-based IFR Probability (Lower Right), all imagery at 0645 UTC on 18 September 2013 (click image to enlarge)
Fifteen minutes later, the MODIS-based IFR probabilities (above) suggest a strong possibility of IFR conditions in many of the river valleys of Pennsylvania. However, Suomi/NPP and MODIS data come from polar orbiters so that high resolution information is infrequent. When GOES-R is launched, ABI will have nominal 2-km resolution in the infrared, which resolution is intermediate between GOES and MODIS.
The higher-resolution polar orbiters’ occasional views can give a forecaster an important heads’ up for fog formation. By 0815 UTC the GOES-based information is showing higher IFR probabilities in the river valleys of Pennsylvania, but a Suomi/NPP overpass shows that it is still underestimating the areal extent of the fog.
GOES-R IFR Probability (Upper Left), GOES-East Brightness Temperature Difference (Upper Right), Toggle between Suomi/NPP Day/Night band imagery and Suomi/NPP Brightness Temperature Difference (Lower Left), MODIS-based IFR Probability (Lower Right), all imagery at ~0815 UTC on 18 September 2013 (click image to enlarge)
Note that this is a time of year when stray light does occasionally enter the GOES signal, causing contamination. This occurred — and was very obvious — around 0400 UTC on 18 September. As is typical, it was present for only one scan. See below.
GOES-R IFR Probability (Upper Left), GOES-East Brightness Temperature Difference (Upper Right), GOES-R Cloud Thickness (Lower Left), MODIS-based IFR Probability (Lower Right), all imagery at ~0815 UTC on 18 September 2013 (click image to enlarge)



{kind=link}