GOES-R IFR Probabilities computed from MODIS and from GOES-15, both at ~0700 UTC on 14 April 2015 (Click to enlarge)
At very high latitudes, limb effects can alter the brightness temperature difference between 10.7 µm and 3.9 µm. GOES also has very large pixel sizes at high latitudes. The image above toggles between the GOES-R IFR Probability computed using MODIS and GOES-15. Observations — scant over Alaska — of ceilings and observations are superimposed on the imagery. GOES-based GOES-R IFR Probabilities are elevated over much of Alaska; in contrast, MODIS-based IFR Probabilities show larger values in only a few regions.
MODIS-based values at high latitudes are available frequently compared to lower latitudes. At 0830/0845 UTC, below, MODIS data show a slow expansion in values (note that eastern Alaska was not viewed by MODIS at this time). At about 1100 UTC, the slow areal increase in IFR Probabilities continues.
GOES-R IFR Probabilities computed from MODIS and from GOES-15, both at ~0830 UTC on 14 April 2015 (Click to enlarge)
GOES-R IFR Probabilities computed from MODIS and from GOES-15, both at ~1100 UTC on 14 April 2015 (Click to enlarge)
The 1100 UTC MODIS pass was over only eastern Alaska, and it shows relatively large values in some spots of northeastern Alaska. The high values from the GOES-based GOES-R IFR Probabilities over central Alaska can probably be discounted. Note, however, that the highest GOES-based GOES-R IFR Probabilities do have a counterpart in the MODIS-based field.
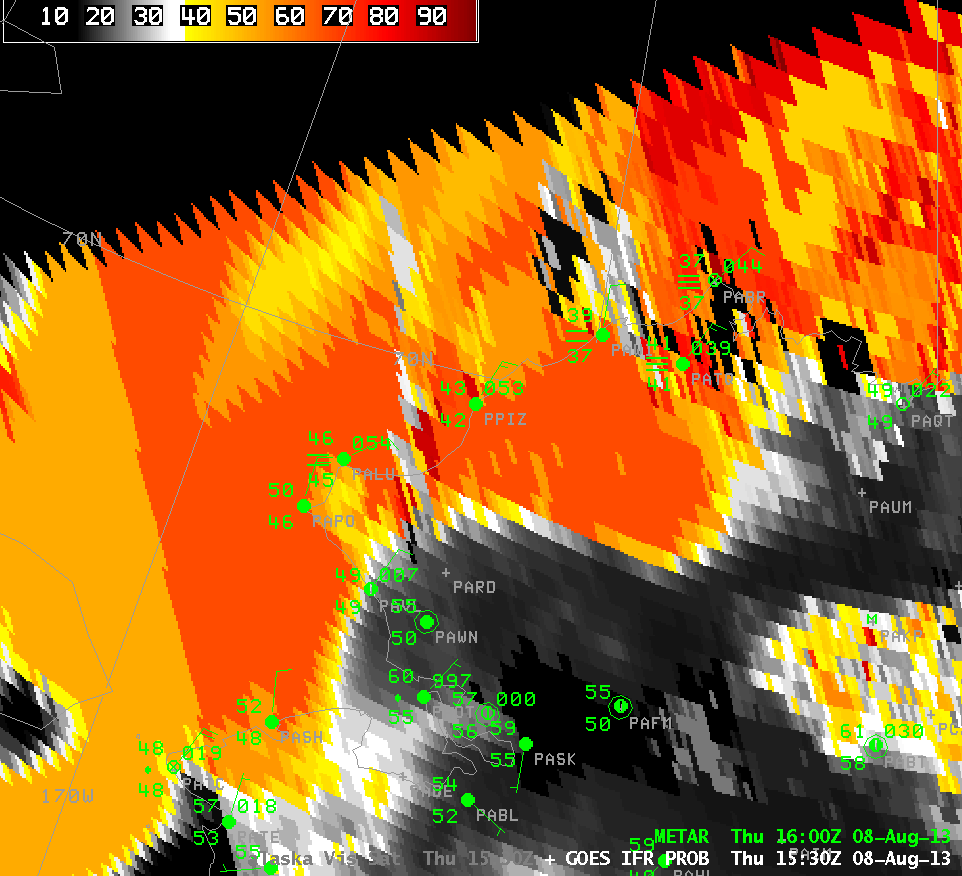
At 1400 UTC, no MODIS pass was available. The GOES-based image, below, again has large values over northern Alaska (with corroborating surface observations at Point Lay (where snow is falling) and at Atqasuk (where freezing fog is reported). MODIS-based data from earlier in the day adds confidence to the discounting of widespread modest (40-50%) IFR Probability values over central Alaska.
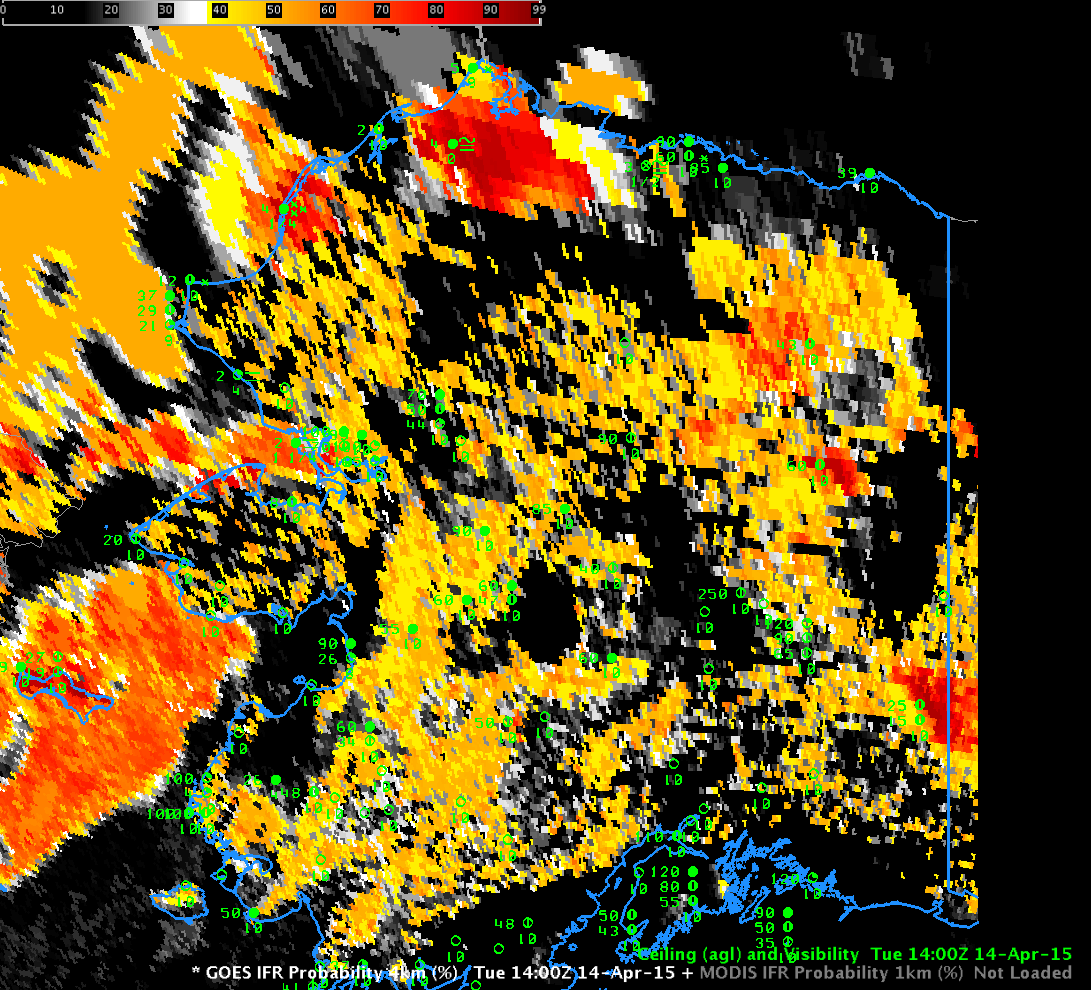
GOES-R IFR Probabilities computed from GOES-15 at 1400 UTC on 14 April 2015 (Click to enlarge)
")
 (Click to see animation)")
")
")
")
{kind=link}