 |
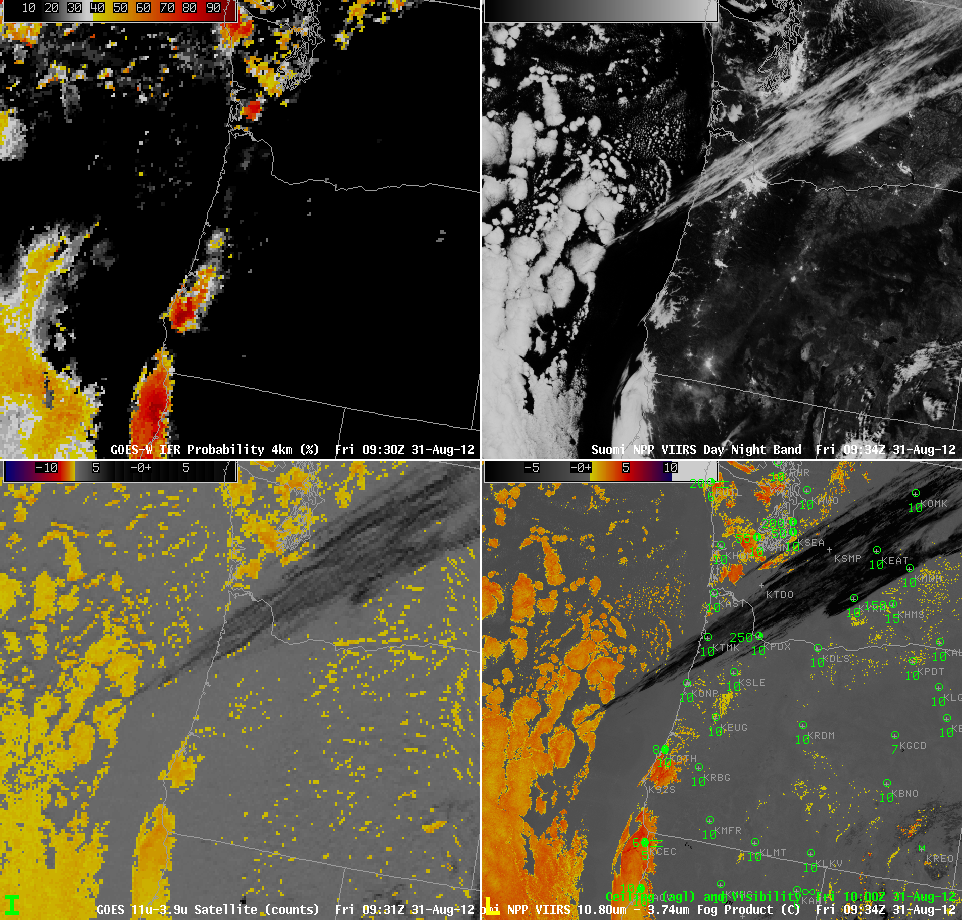
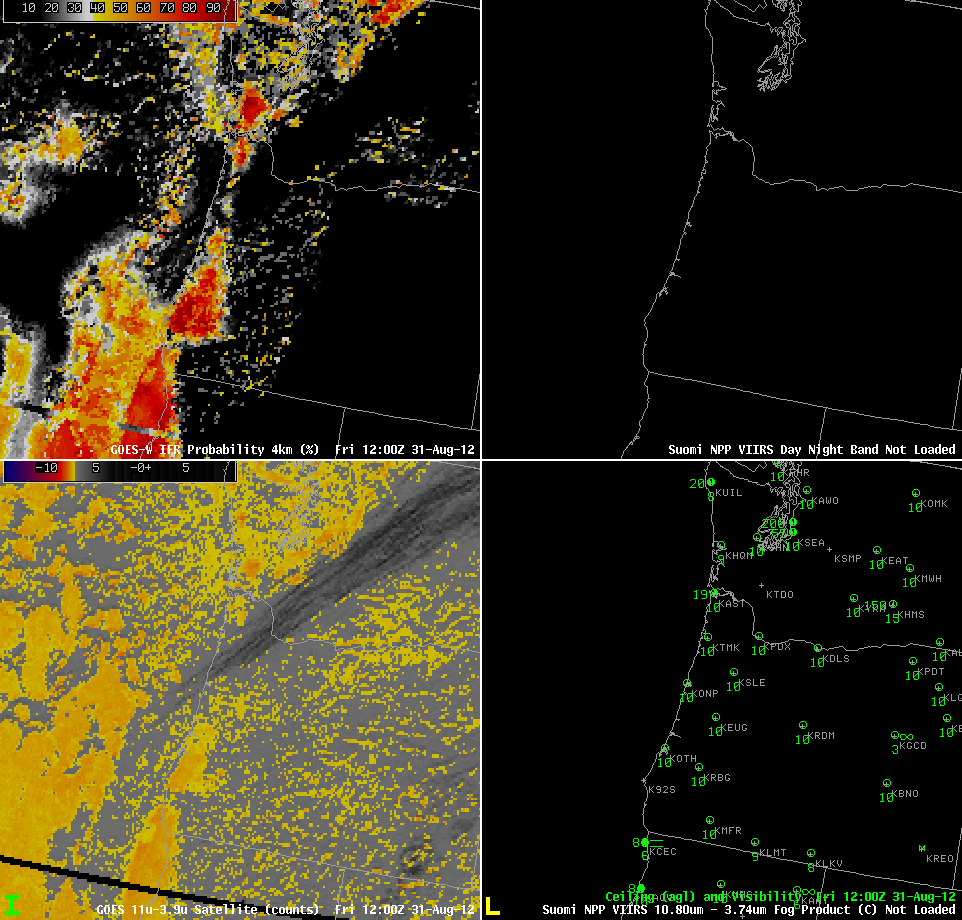
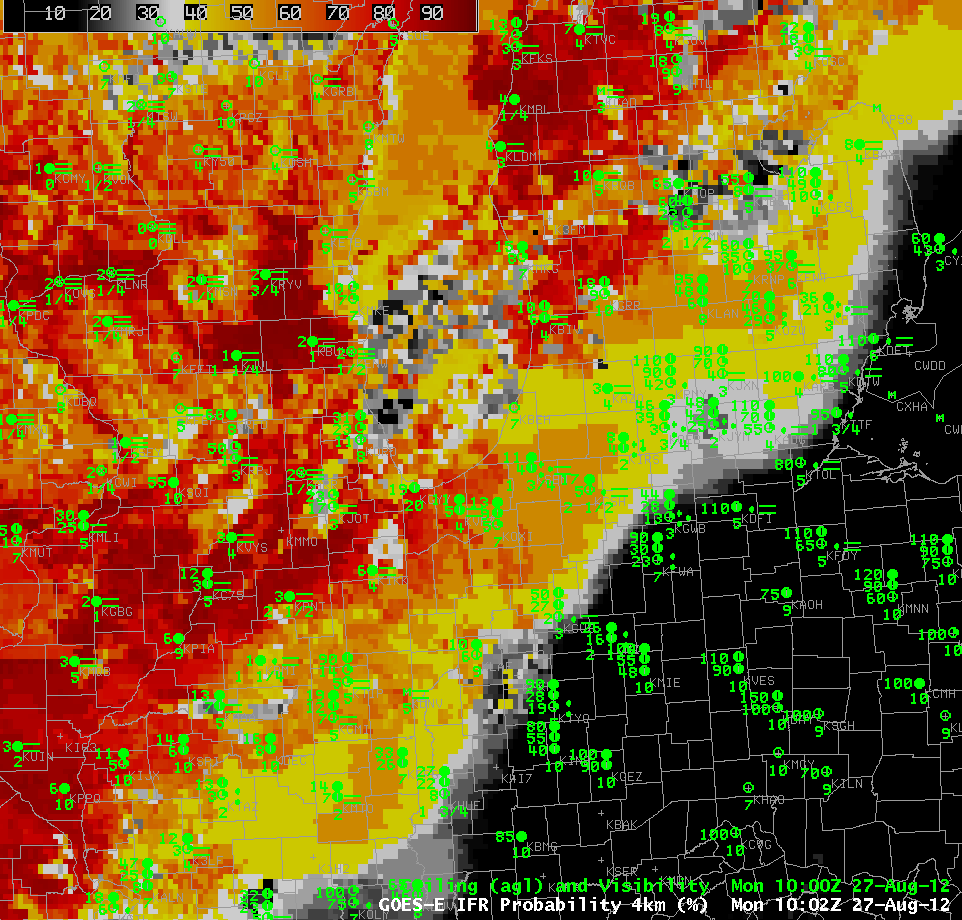
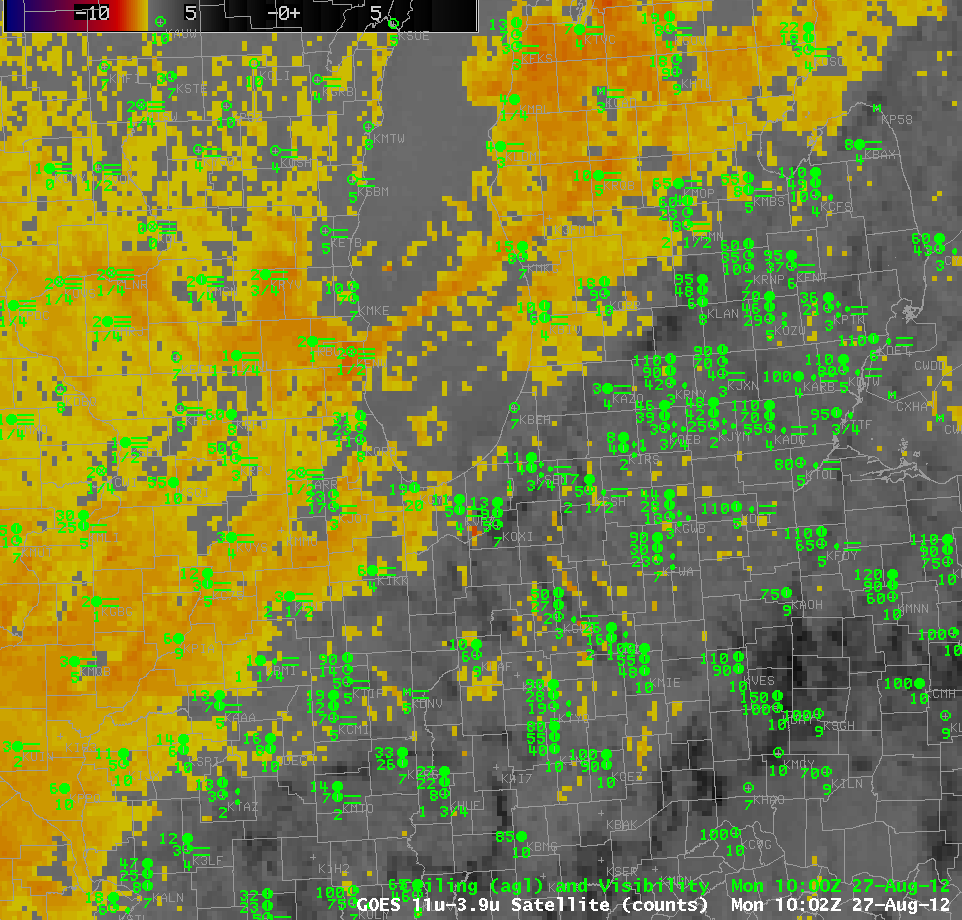
| GOES-R IFR Probabilities (Upper left), Color-enhanced Topography (Upper right), Surface Observations and ceilings (Lower Left), Enhanced 10.7 imagery (Lower right) |
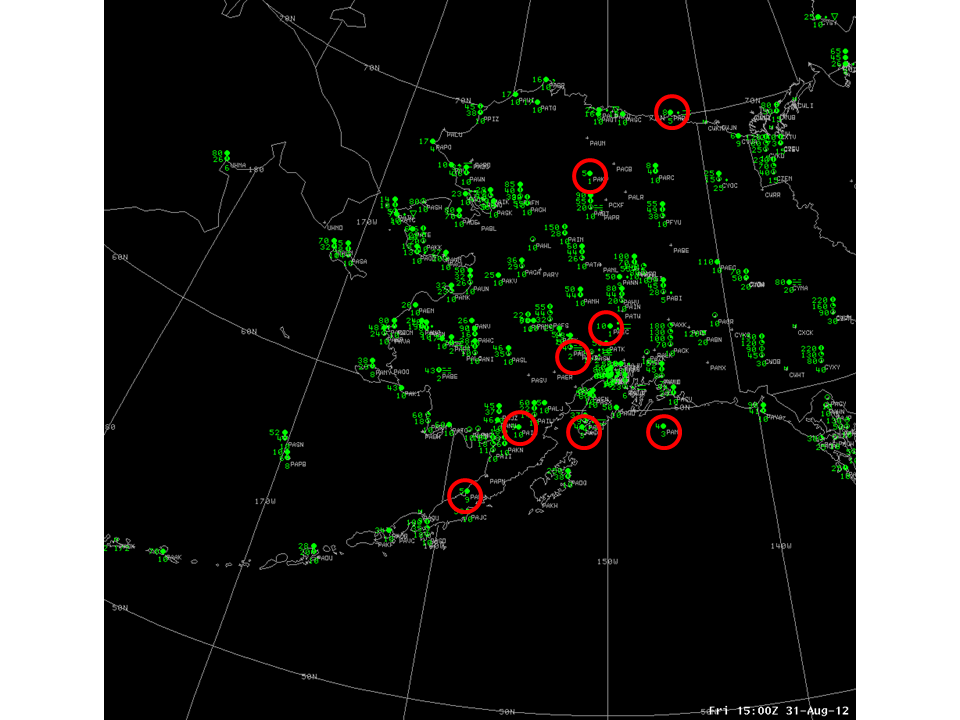
Oceanic storms will generate IFR conditions, and the GOES-R IFR Probability fields, a fused product that blends satellite and model information, provides an indication of how and when visibilities decrease. The animation above, at hourly intervals, shows the steady advance of higher IFR probabilities eastward through the Gulf of Alaska. Note how the observations at Middleton Island (PAMD) and at Yalutat (PAYA) both transition to IFR conditions as the ‘front’ of higher probabilities passes — around 0700 UTC at PAMD and around 1300 UTC at PAYA.
The IFR probability field includes regions that are characteristic of model-only predictors being used (the large yellow region that stretches NNE-SSW over the Gulf of Alaska at 1200 UTC) and regions where both model and satellite data are used (the more pixelated region south of the Aleutians at the end of the animation). When model predictors only are used, probabilities are typically lower than when both model and satellite predictors are used.