
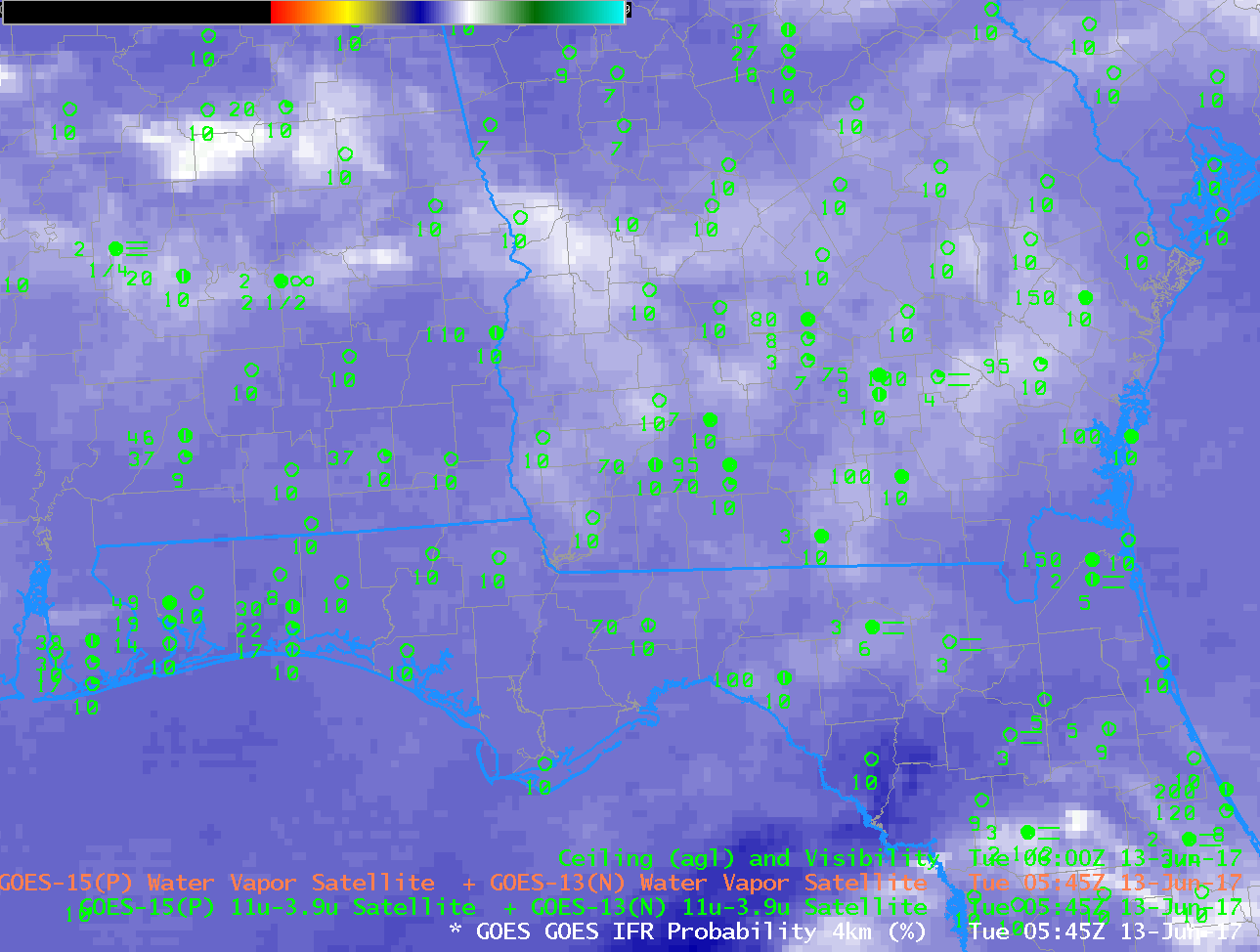
GOES-R IFR Probability fields, 0545, 0800, 1000 and 1300 UTC on 13 June 2017 (Click to enlarge)
GOES-16 data posted on this page are (still!) preliminary, non-operational data and are undergoing testing
Note: GOES-R IFR Probabilities are computed using Legacy GOES (GOES-13 and GOES-15) and Rapid Refresh model information; GOES-16 data will be incorporated into the IFR Probability algorithm in late 2017
Reduced visibilities and lowered ceilings — IFR and Low IFR conditions — occurred over a wide stretch of the southeastern United States on the morning of 13 June 2017. The animation above shows enhanced IFR Probabilities aligned northwest to southeast from central Alabama to northwest Florida, the region where IFR Conditions develop. The flat nature of the field suggests that satellite data are not widely available as a predictor for low clouds on this morning, and that is because of widespread cirrus clouds over the southeastern United States (Click here to see the 0545 and 1300 UTC GOES-13 Water Vapor Imagery with cold brightness temperatures over the southeast). When high clouds are present, satellite-only detection of low clouds is not feasible.
{kind=link}
{kind=link}
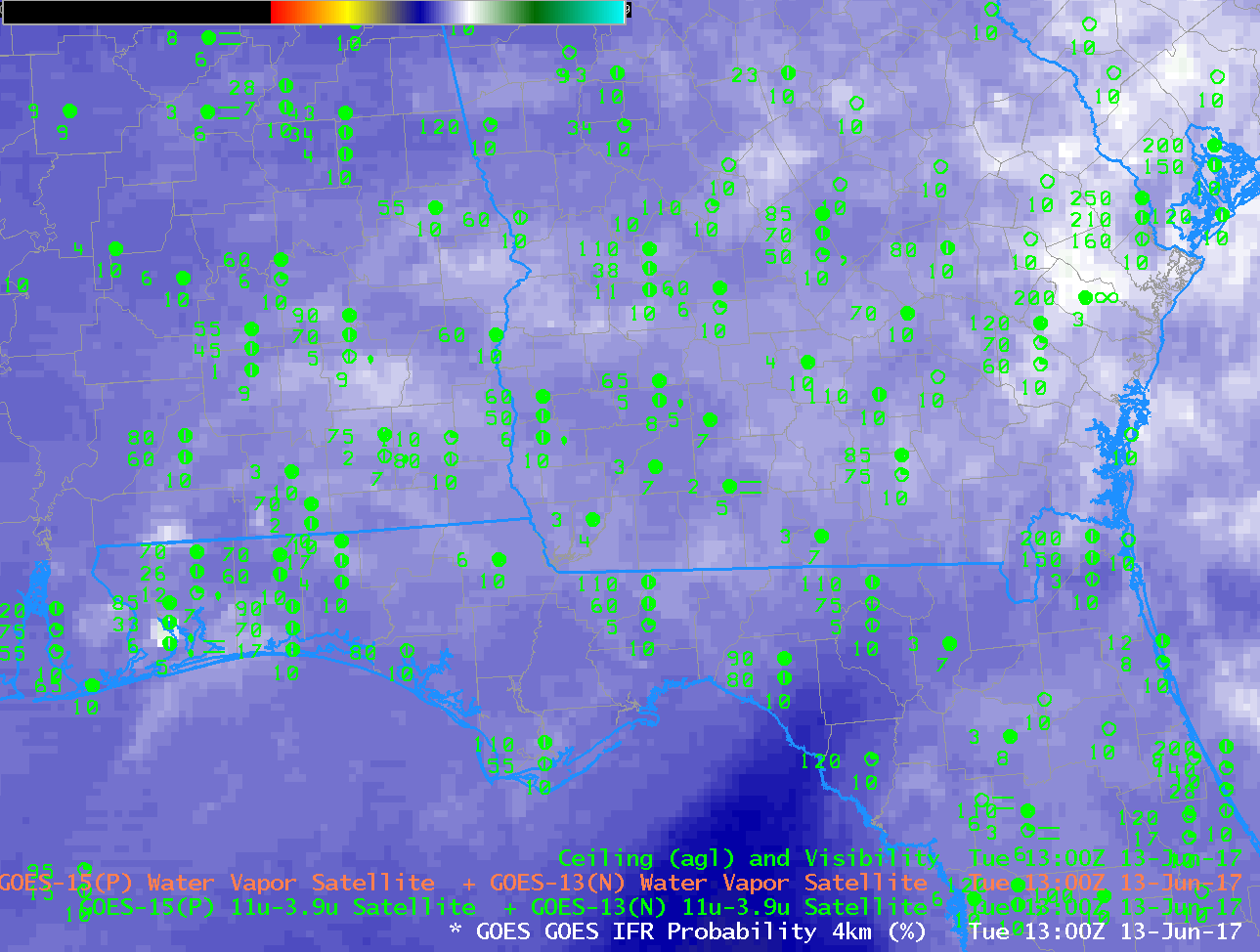
For example, the brightness temperature difference field from GOES-13 (3.9 µm – 10.7 µm), below, has little predictive value for the northwest-to-southeast-oriented feature of low clouds/reduced visibilities because cirrus clouds are blocking the view.
GOES-13 Brightness Temperature Difference (3.9 µm – 10.7 µm) at 0545, 0800, 1000 and 1315 UTC on 13 June 2017 (Click to enlarge)
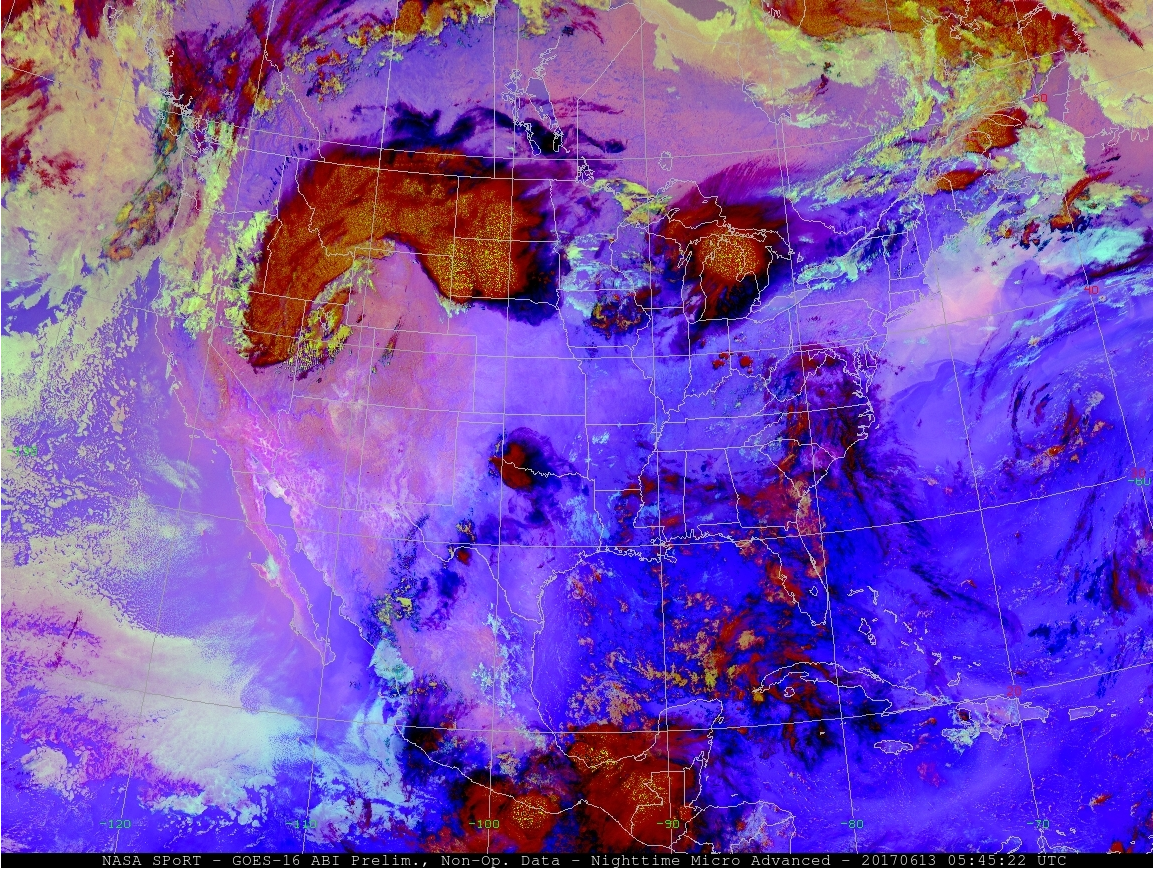
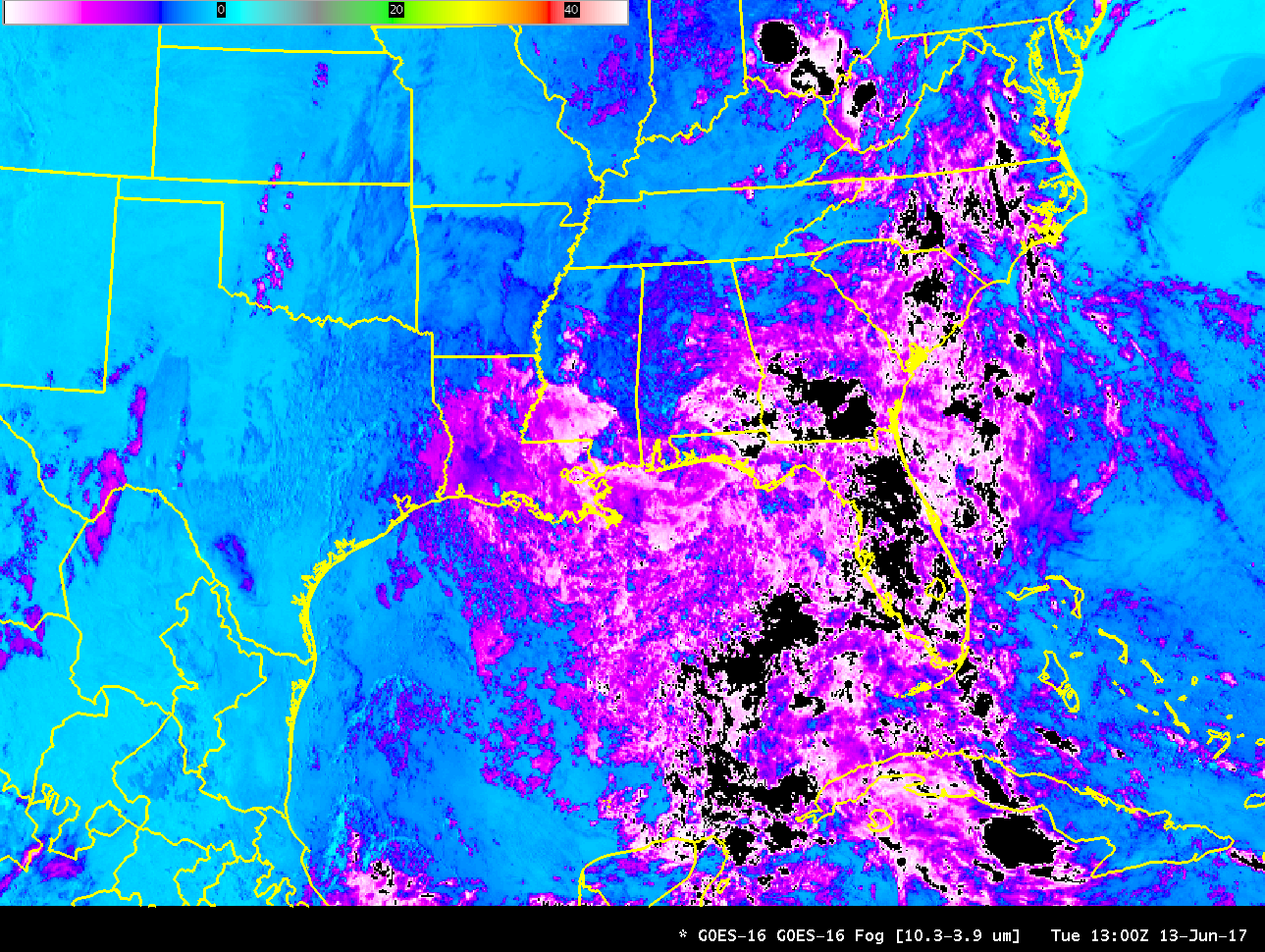
Various other detection techniques that rely on only satellite data similarly will be challenged by the presence of high clouds. For example, the Nighttime Microphysics RGB (From this site) shows little signal of fog (cyan/white in the RGB composite) over Georgia and Florida. Intermittent signals will appear occaionally as high clouds thin to allow the low-cloud signal through. The GOES-16 Brightness Temperature Difference field (10.33 µm – 3.9 µm) similarly is challenged by the presence of high clouds. The example shown at 1300 UTC shows a negative value because of reflectance off of high clouds.
{kind=link}
{kind=link}
Because the IFR Probability fields include surface information in the form of output from the Rapid Refresh model (saturation in the lowest part of the model is used as a predictor for the presence of fog), IFR Probability fields can fill in regions where satellite data cannot be used to detect low clouds because of the presence of high clouds. In regions where high clouds are present, satellite-only detection of fog and low stratus will always be a challenge.