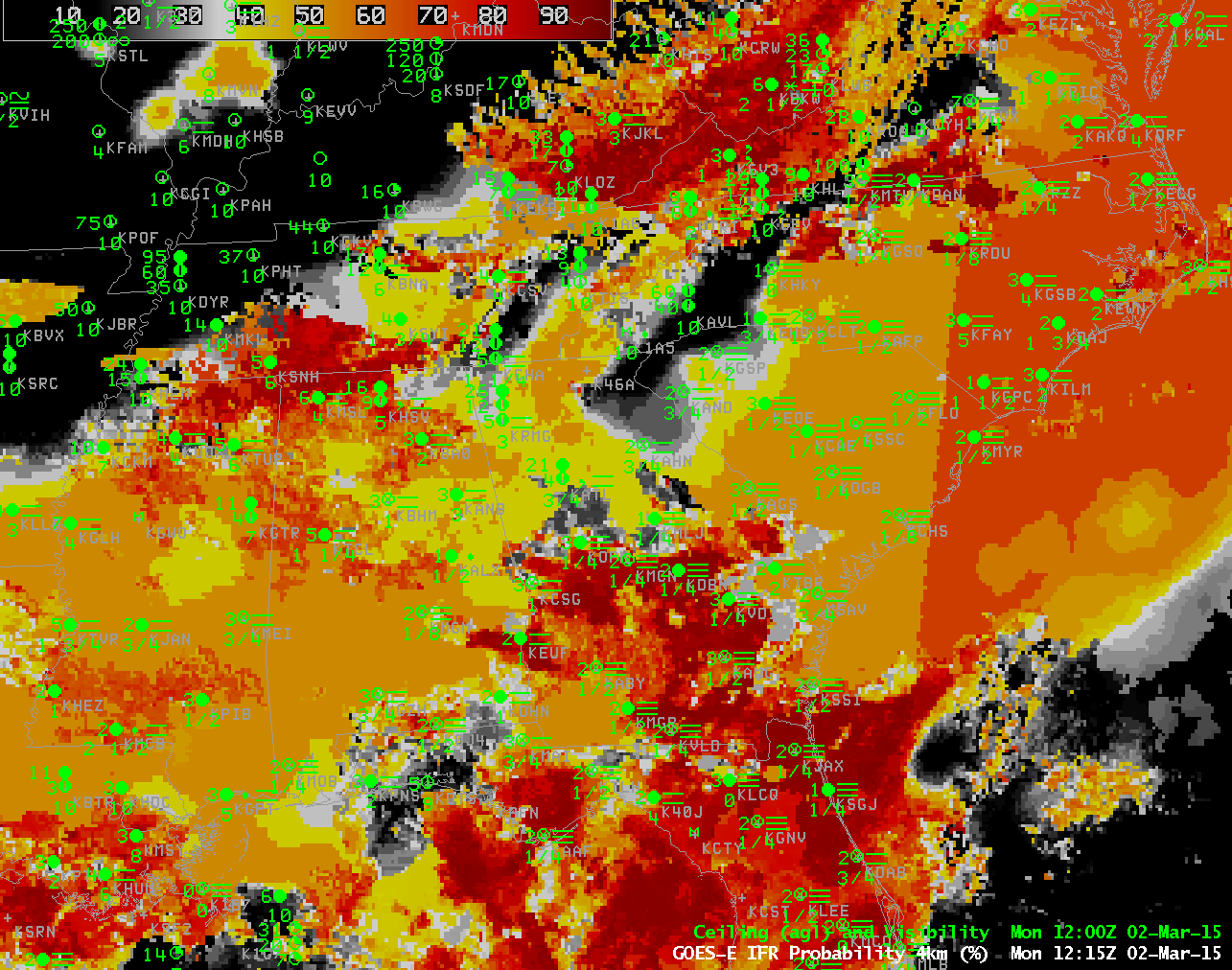
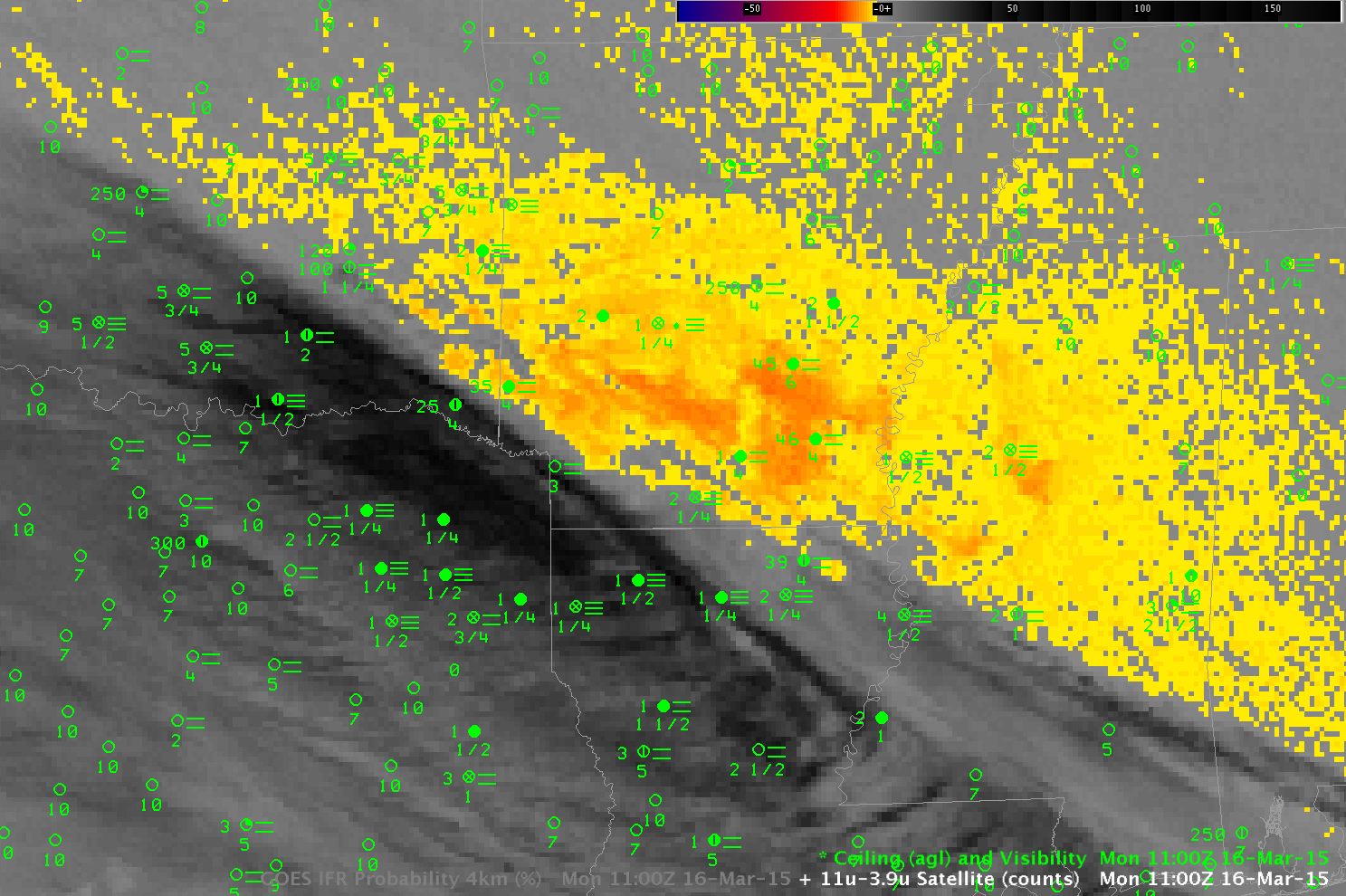
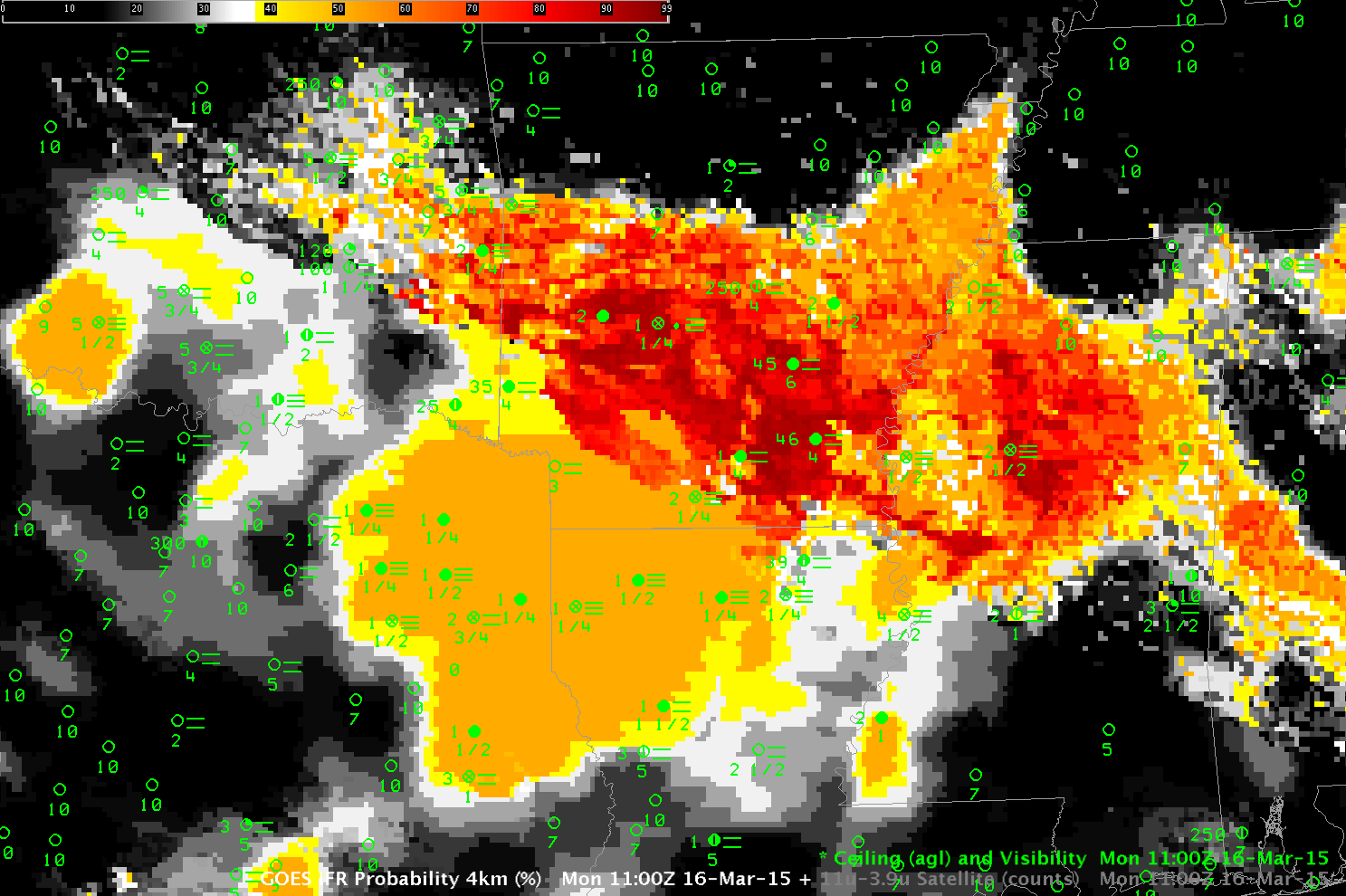
GOES-R IFR Probabilities over Indiana around sunrise on March 11 demonstrated what can happen when the Cloud Mask does not detect clouds, for whatever reason. The three-image loop above shows GOES-R IFR Probability at 1230, 1315 and 1330 UTC on 11 March. In the 1230 UTC image, the boundary between daytime predictors (to the east) and nighttime predictors (to the west) is manifest as a nearly north-south line through Kentucky and eastern Indiana. At 1315 UTC, a different boundary has appeared central lower Michigan, and this boundary moves westward to central Illinois at 1330 UTC. IFR Probabilities drop quickly to ~2% as this boundary passes, even though widespread IFR conditions are apparent. What is going on?
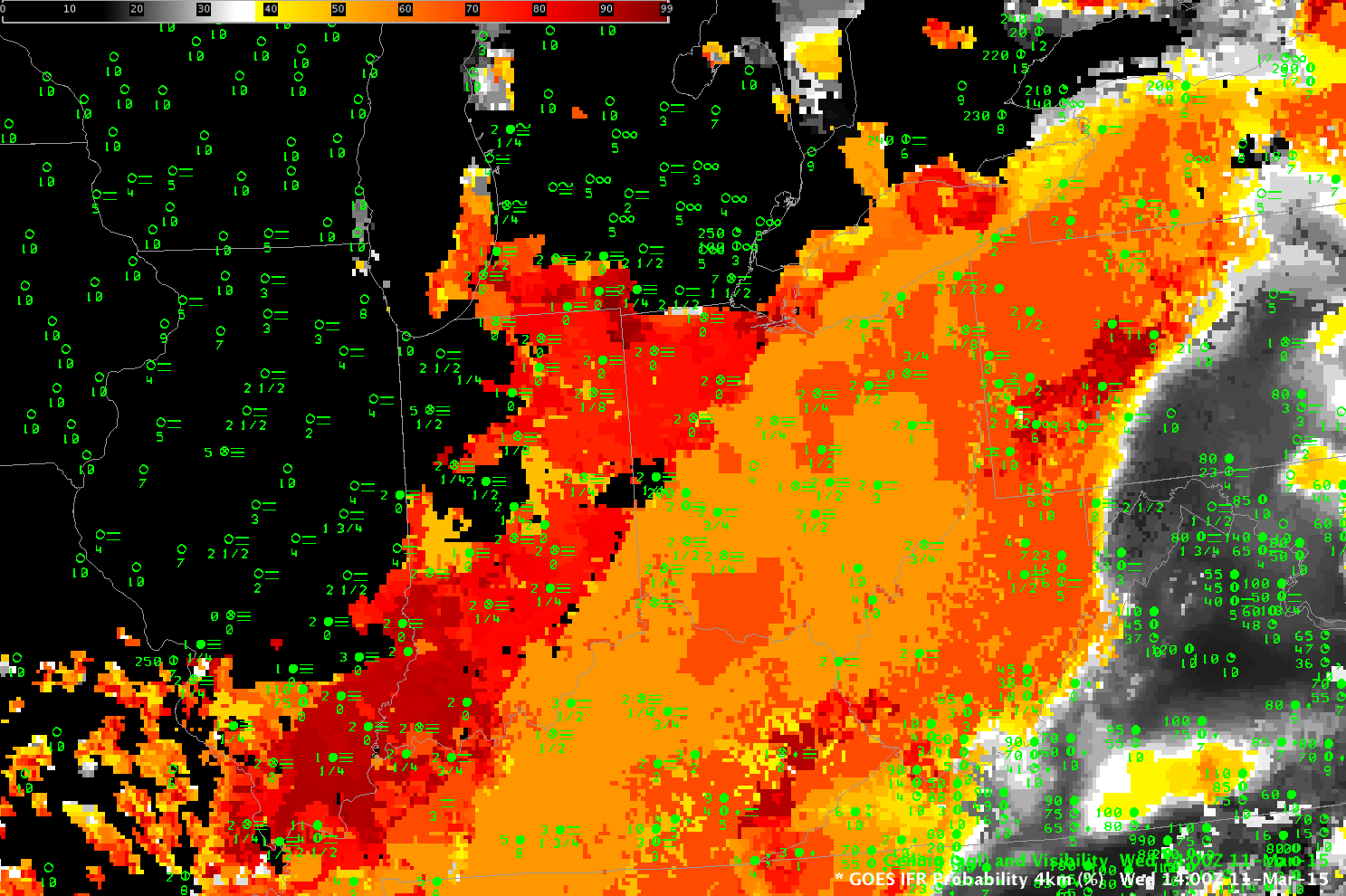
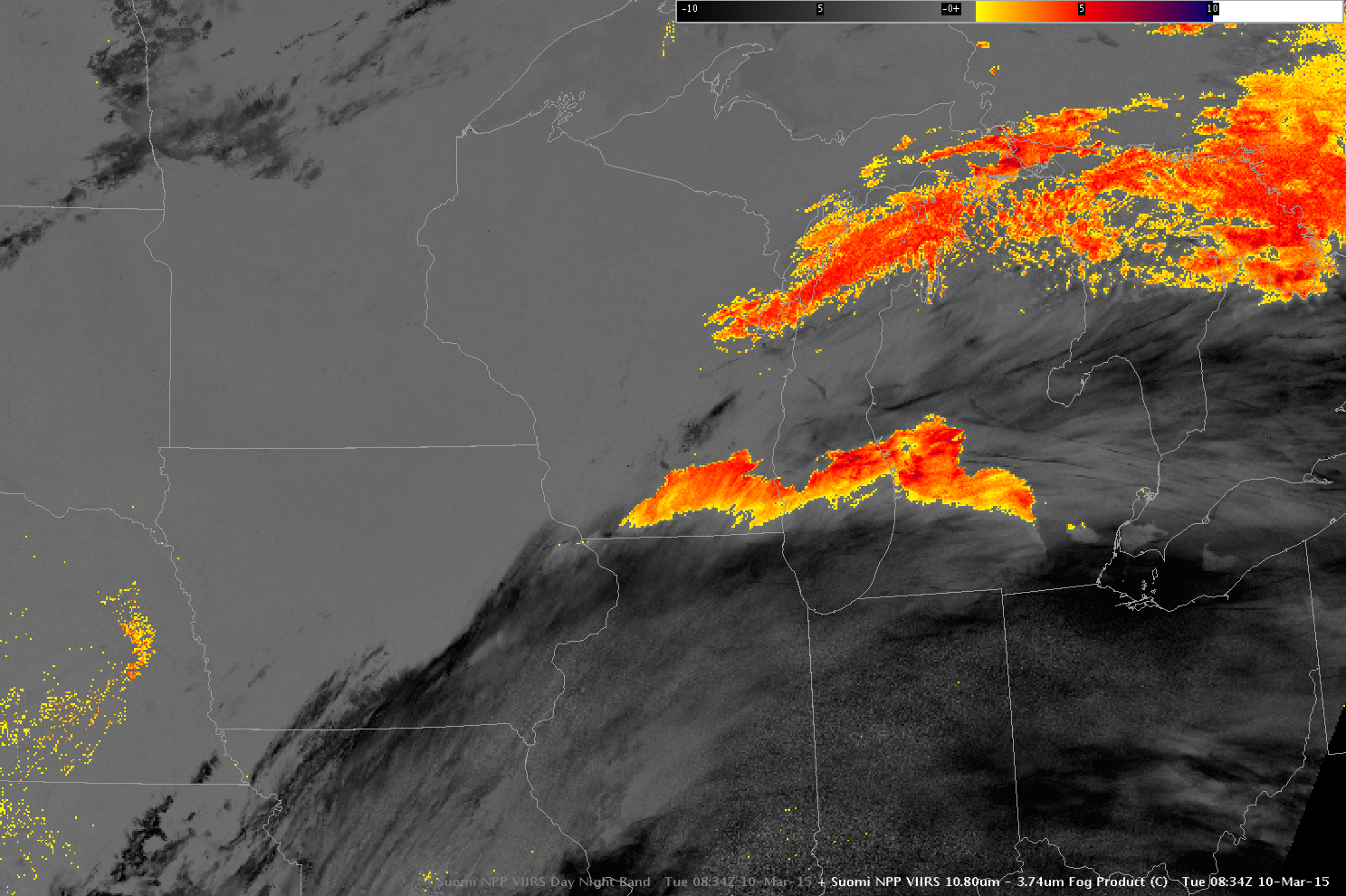
In this case, the cloud mask algorithm has failed to identify clouds over Indiana where clouds are present. A lack of clouds suggests Fog cannot be present. During the night, cloud masking is assigned less weight (because cloud detection is more difficult at night) so the cloud mask has a smaller impact on the IFR Probability. As night transitions into day, however, cloud masking acquires more importance in the computation of IFR Probability so the lack of a cloud will greatly influence IFR Probabilities. The IFR Probability algorithm also has a temporal check, so the effect of no cloud — as determined by the cloud mask — does not happen immediately as the sun rises. The animation below of cloud type shows no cloud type detected (starting at 1215 UTC over Michigan) in the regions where IFR Probabilities dropped. (That is, the cloud mask says no cloud is present; note also how IFR Probabilities do persist with the supercooled clouds over lower Lake Michigan, and with the clouds over southern Illinois). Notice also how the cloud type returns over southern Illinois at 1315 UTC — the cloud mask is more accurate at that point. Cloud masking identifies clouds over most of Indiana and Illinois by 1400 UTC; this can be deduced by the presence of cloud type values there. The 1400 UTC GOES-R IFR Probability field, at bottom, shows IFR Probabilities redeveloping over Indiana and Illinois.
The Cloud Mask that is used by GOES-R IFR Probabilities is scheduled to be replaced with a more accurate (and more up-to-date) Bayesian Cloud Mask in the near future. This change, and GOES-R data (GOES-R is scheduled to launch on March 11 2016, in one year) will likely mitigate such cloud-masking errors as occurred on March 11 2015.
GOES-13 Cloud Type, 1045 – 1430 UTC on 11 March 2015 (Click to enlarge)
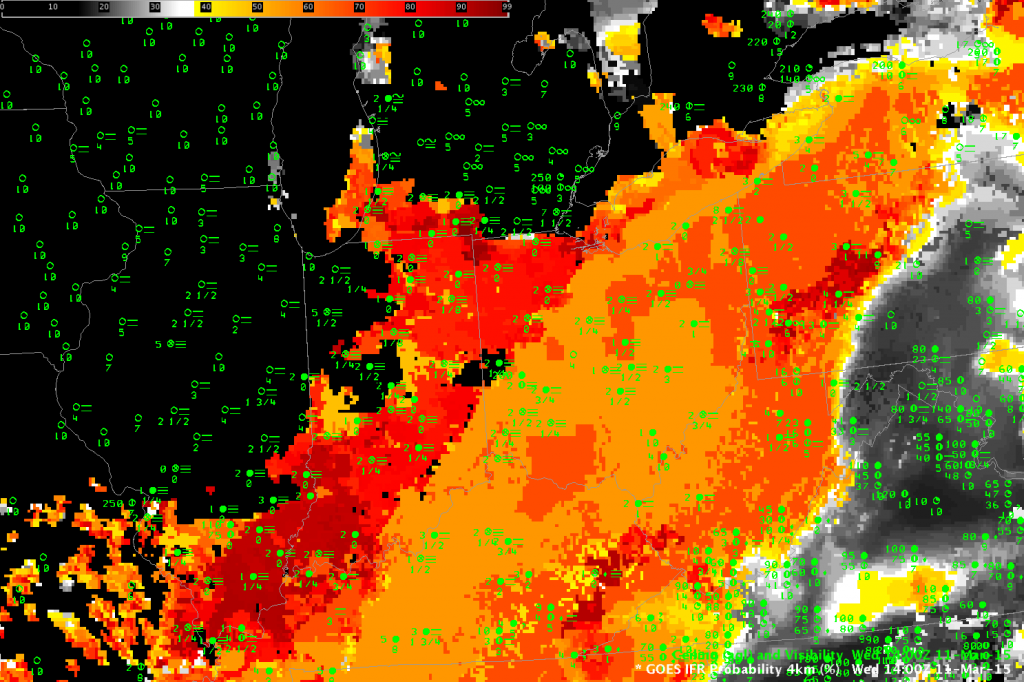
GOES-R IFR Probabilities, 1400 UTC 11 March 2015 (Click to enlarge)


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}