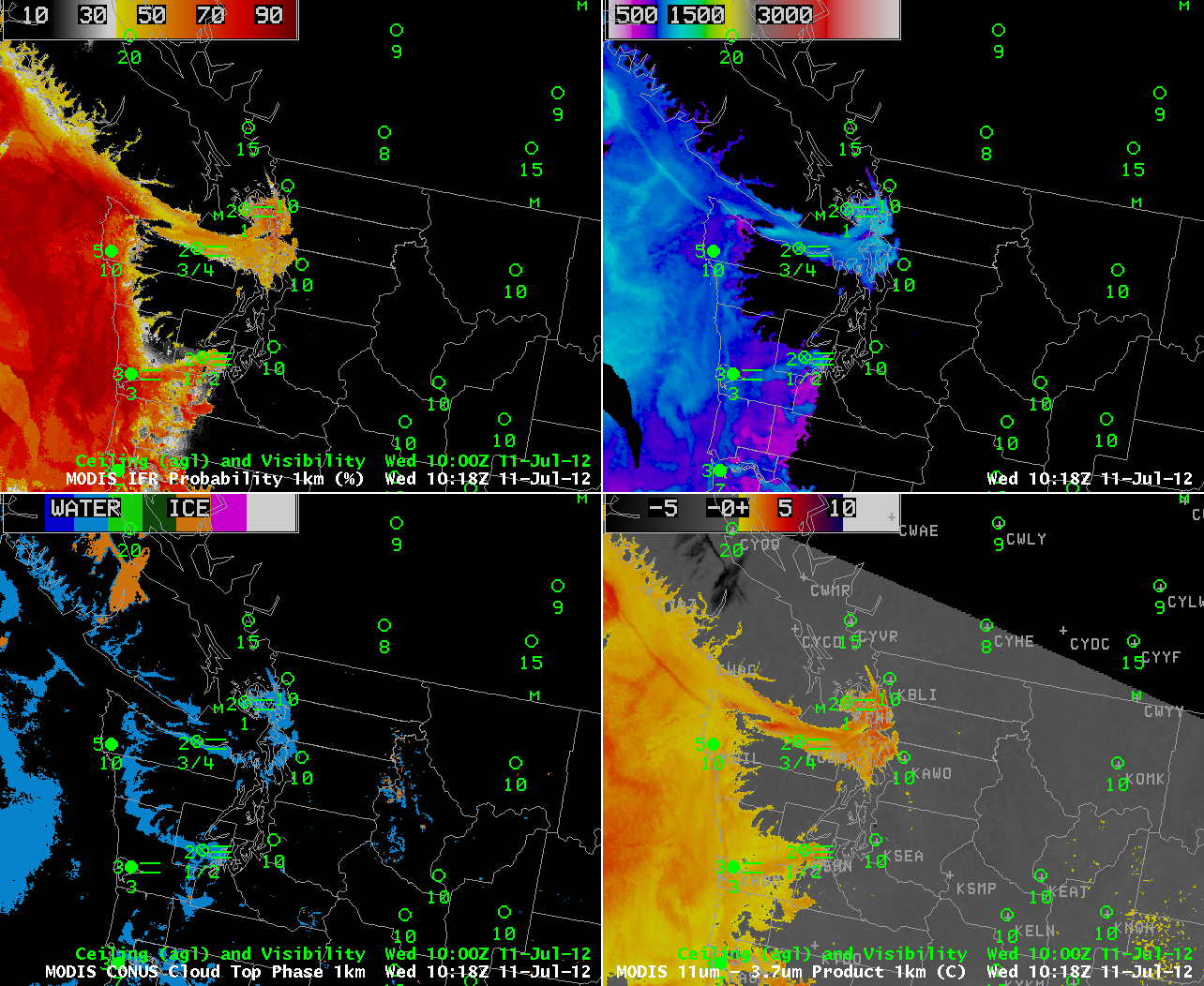
The image above shows IFR probabilities (upper left), Cloud depth (upper right), Cloud type (lower left) and enhanced brightness temperature differences (11 microns – 3.7 microns) for a Puget Sound Fog Event on 11 July 2012. Heightened IFR probabilities occur where surface observations show IFR conditions are present.
Cloud depths at KUIL, on the coast of Washington are around 800 feet. The sounding from 72797, below, shows a saturated region between 962 mb and 949 mb. This is equivalent to a depth (using the hypsometric equation and a mean Temperature in the layer of 13.4 C) of 114 m. If the cloud bases extend down to 980 mb — a possibility — then the layer depth would be about 270 m. Note that the MODIS imagery is not at 1200 UTC, the time of the sounding.

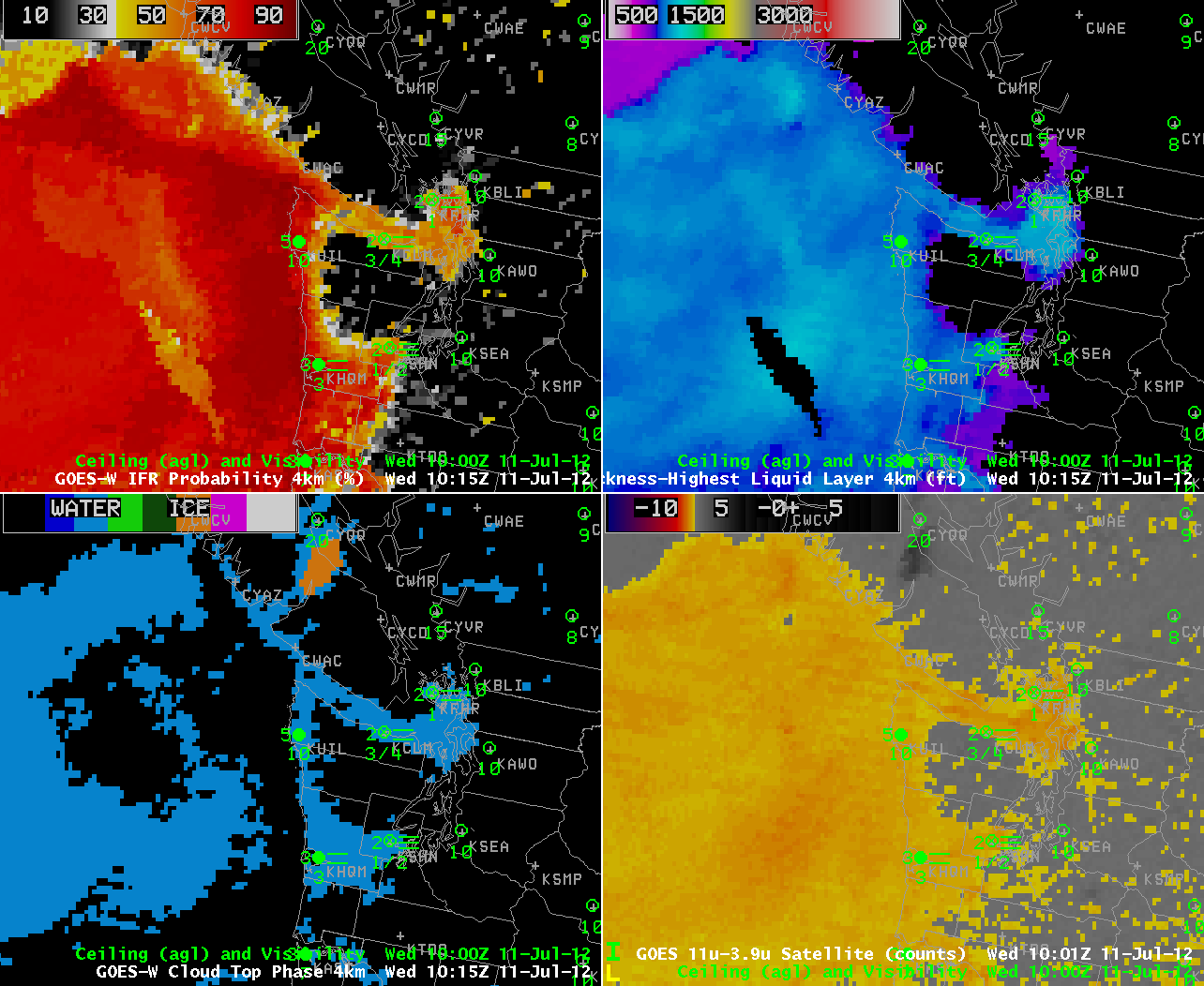
GOES data can also be used to produce Fog/Low stratus products. The GOES Image from the same time, below, shows similar patterns as the MODIS imagery, with the expected differences due to GOES’s inferior resolution. In particular, GOES has difficulties detecting small spatial variability in fog that arises due to river valleys. Note also that the cloud depth at 1015 UTC from GOES shows good agreement with the MODIS product: values are around 900-1000 feet. These values persist through 1200 UTC (the nominal time of the sounding) and beyond.
Note in the Cloud Phase product at night the difficulties inherent in detecting low water clouds over the ocean. Those regions off the coast of Washington are not in fact clear, and both the brightness temperature difference and GOES-R Fog products correctly show fog or low stratus in those areas.
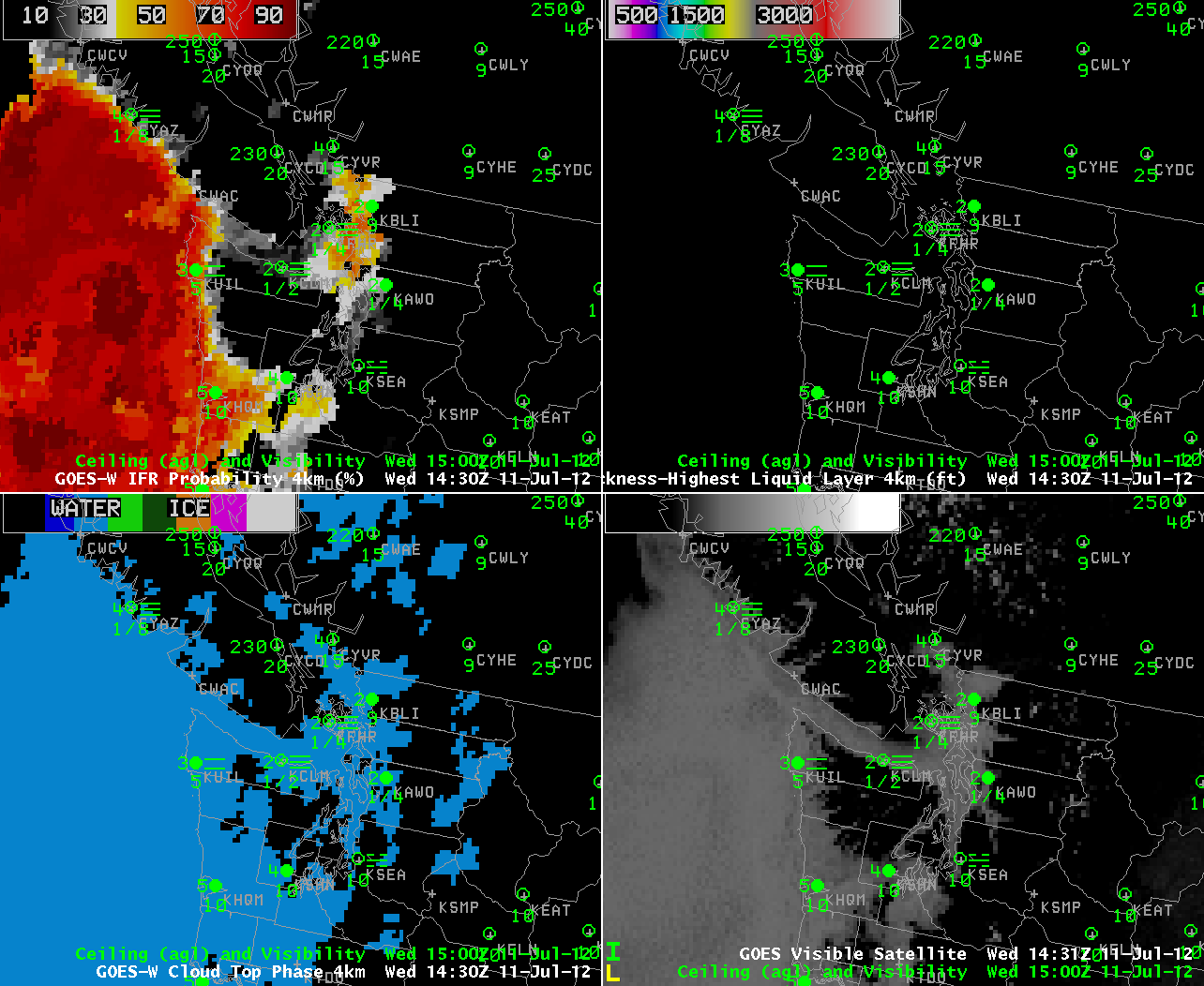
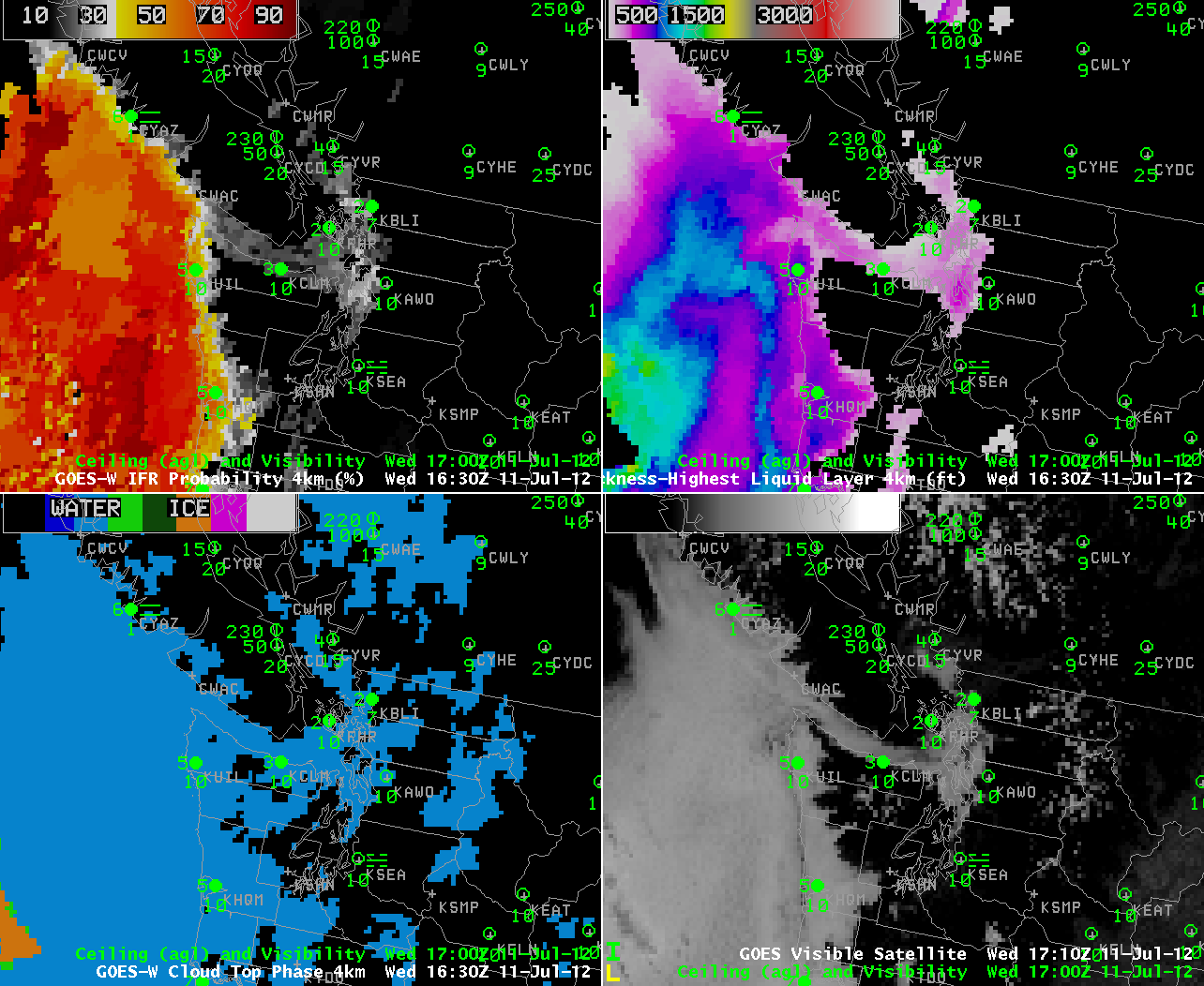
After sunrise, above (the images at 1430/1500 and 1630/1700 UTC), a couple of things change and are noteworthy. First, the Cloud Top Phase product becomes more complete over the ocean as visible data is incorporated into the algorithm. Incorporation of visible data reduces Fog/Low Stratus probabilities over the Puget Sound however, even as visible imagery shows persistent clouds there, and adjacent observations (KCLM/Pt. Angeles, for example) show continued IFR conditions. This may be related to non-uniformity in the horizontal in the visible imagery.