 |
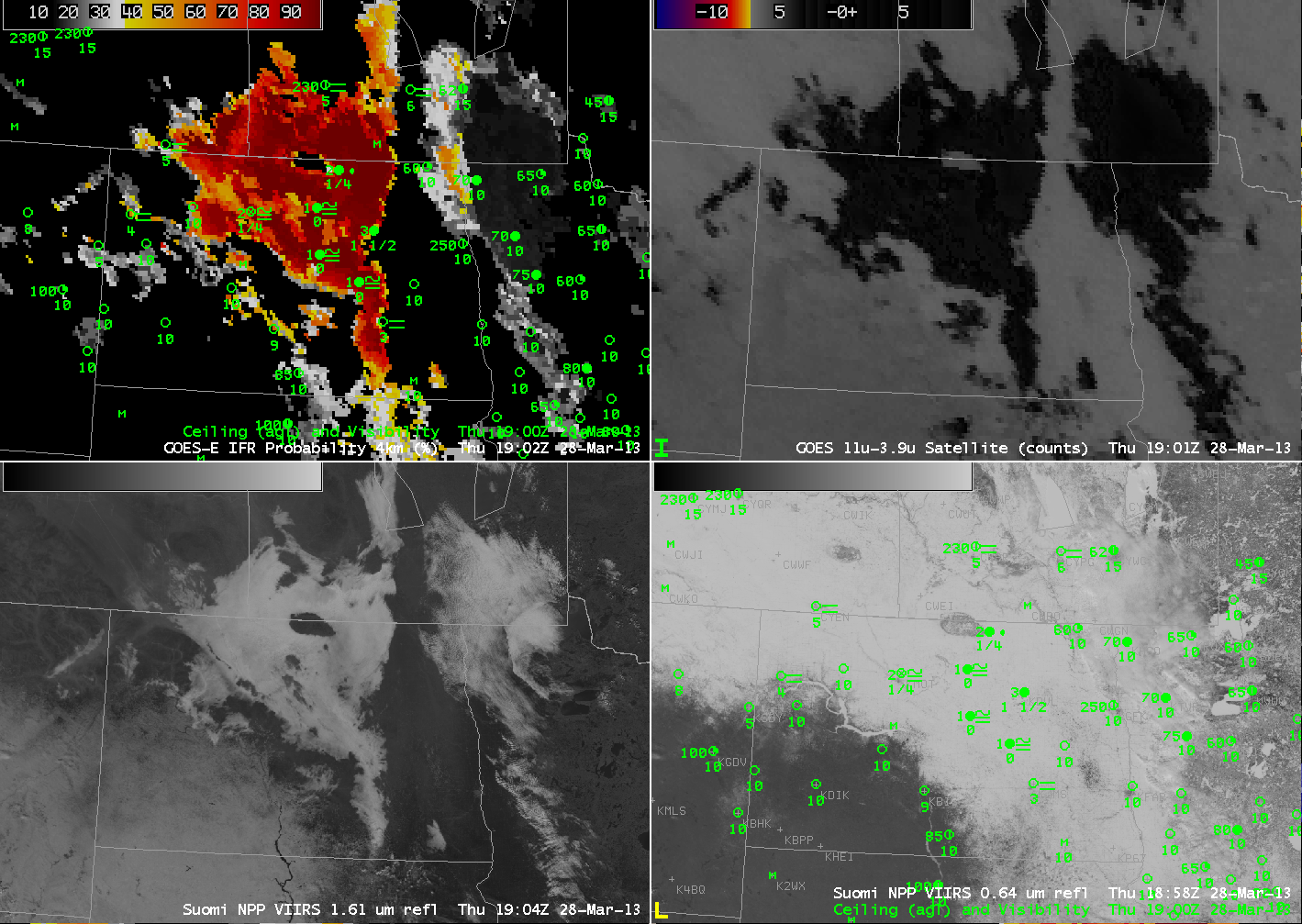
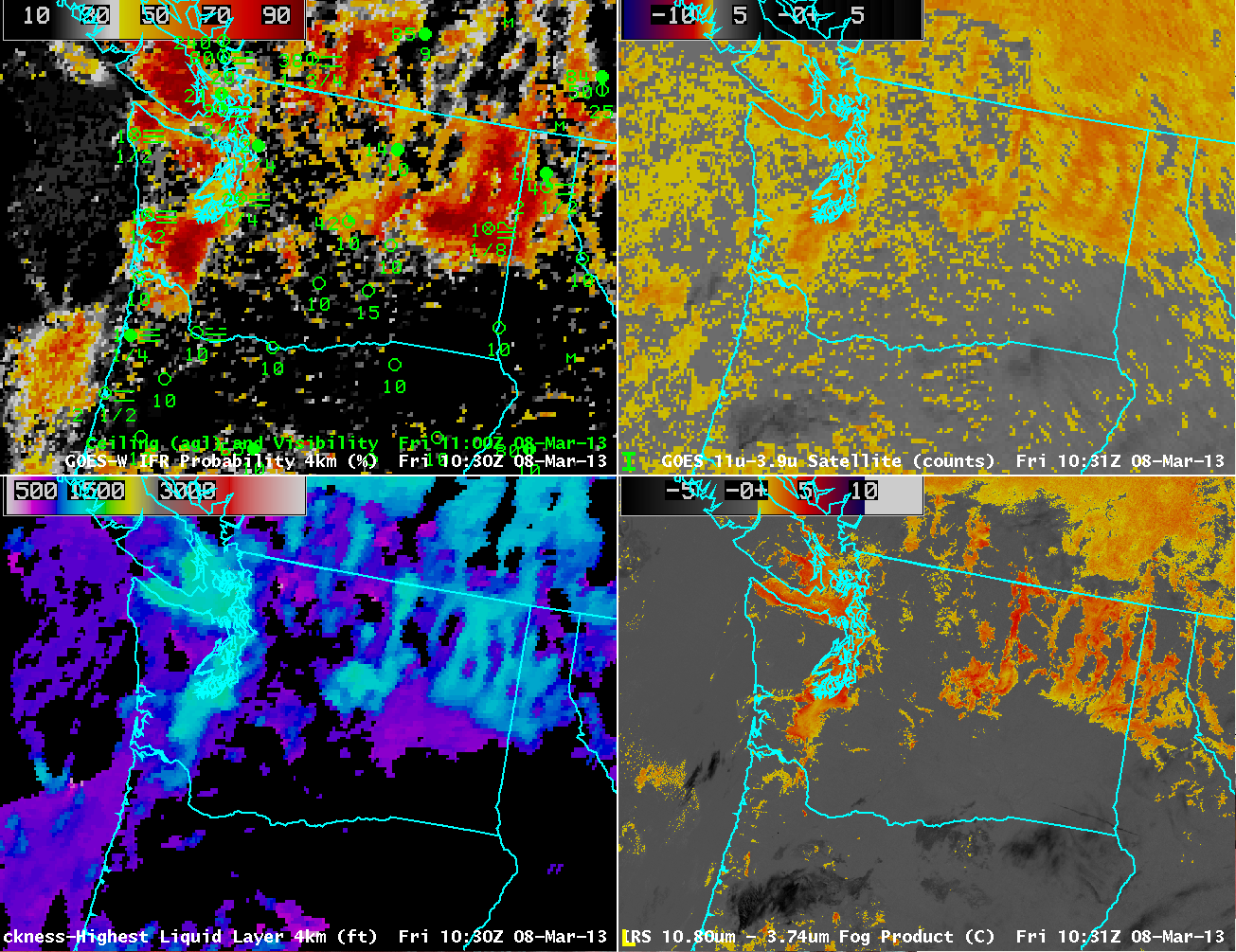
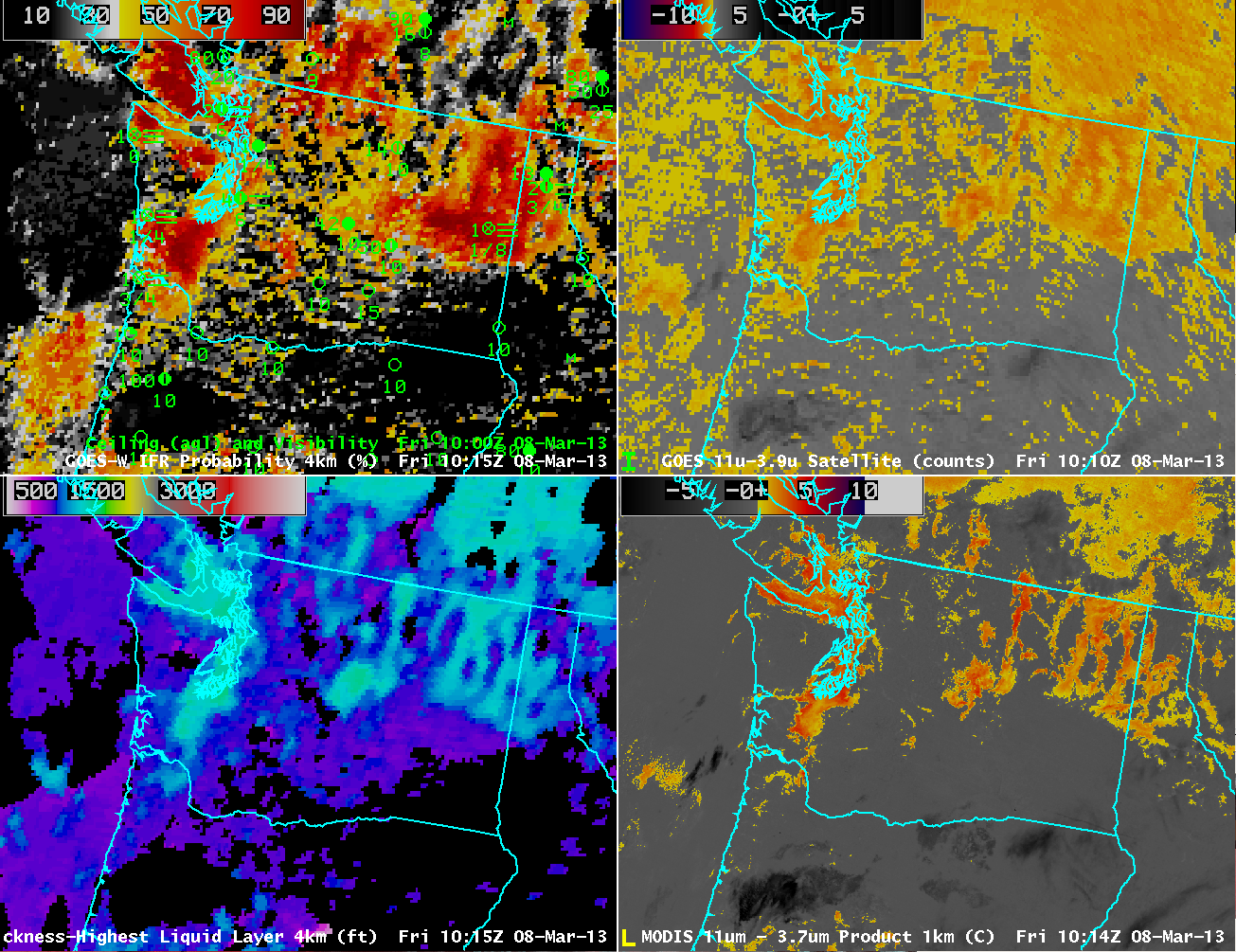
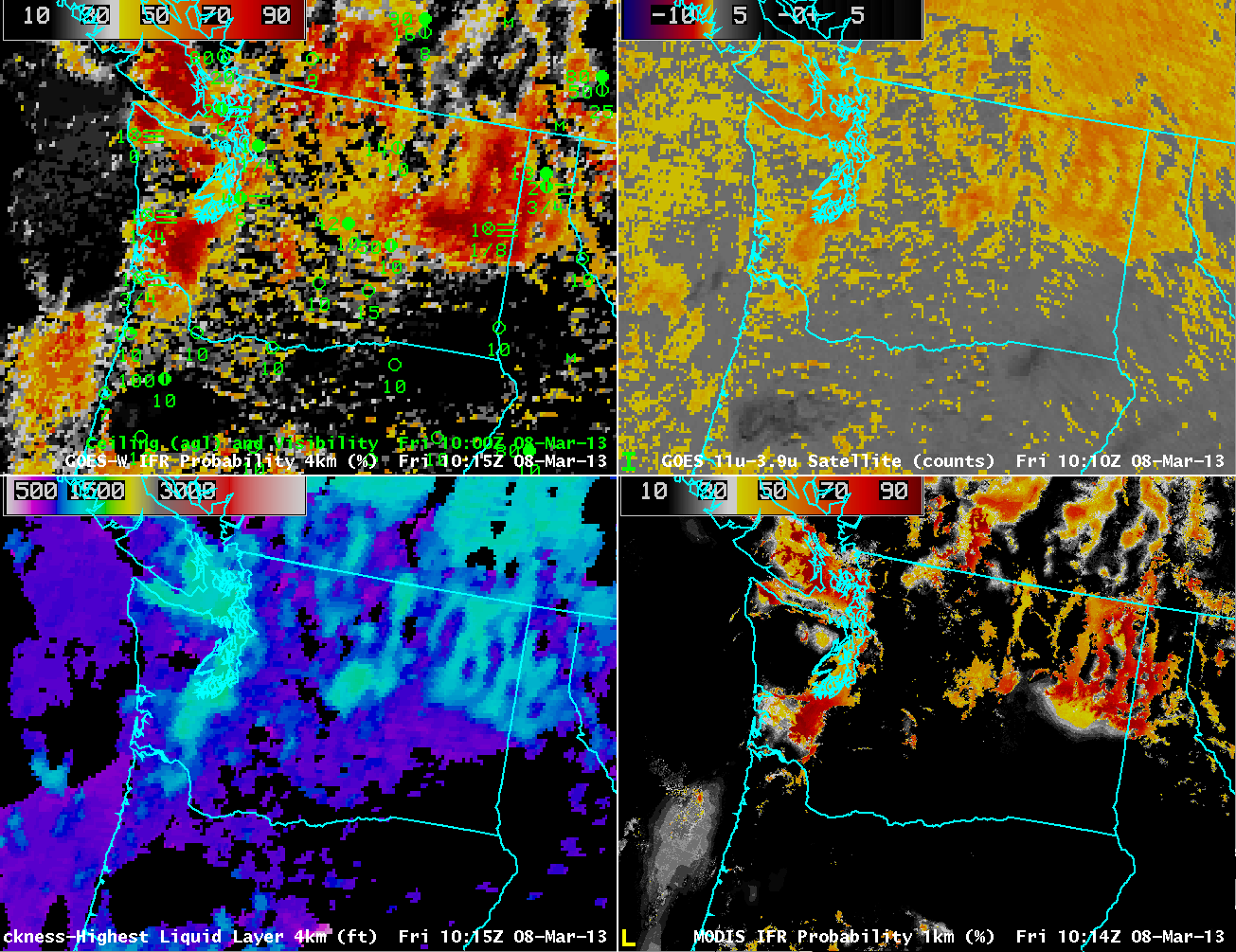
| GOES-R IFR Probabilities computed from GOES-East (Upper Left), MODIS Visible imagery and surface plots of ceilings/visibility (Upper Right), GOES-R IFR Probabilities computed from MODIS (Lower Left), MODIS 10.7 micron data (Lower Right), images at ~1630 and ~1815 UTC. |
Seventeen separate crashes involving nearly 100 vehicles near milepost 5 on Interstate 77 in Carroll County in southern Virginia claimed three lives on Sunday March 31st. The crashes occurred in fog and started around 1 PM (1700 UTC). How did the Fog/Low Stratus product do in alerting forecasters to the presence of the fog? This case demonstrates the challenges inherent in Fog Detection. GOES-R IFR Probabilities show a distinct reduction in probabilities over the crash site in the times bracketing the crash time, above. An animation of GOES-based IFR probabilities, below, shows relatively high probabilities until just before the crash time, after which time probabilities dropped. Photographs from after the crash, during the clean-up, show that fog persisted into the afternoon hours.
 |
| GOES-R IFR Probabilities computed from GOES-East and Rapid Refresh Data, 1602-1815 UTC on 31 March 2013 |
Note that widespread fog is typically not associated with crashes. Rather, patchy fog that can be driven into from regions with greater visibility is a greater hazard. Such patchy fog is most likely to be sub-pixel scale.



{kind=link}