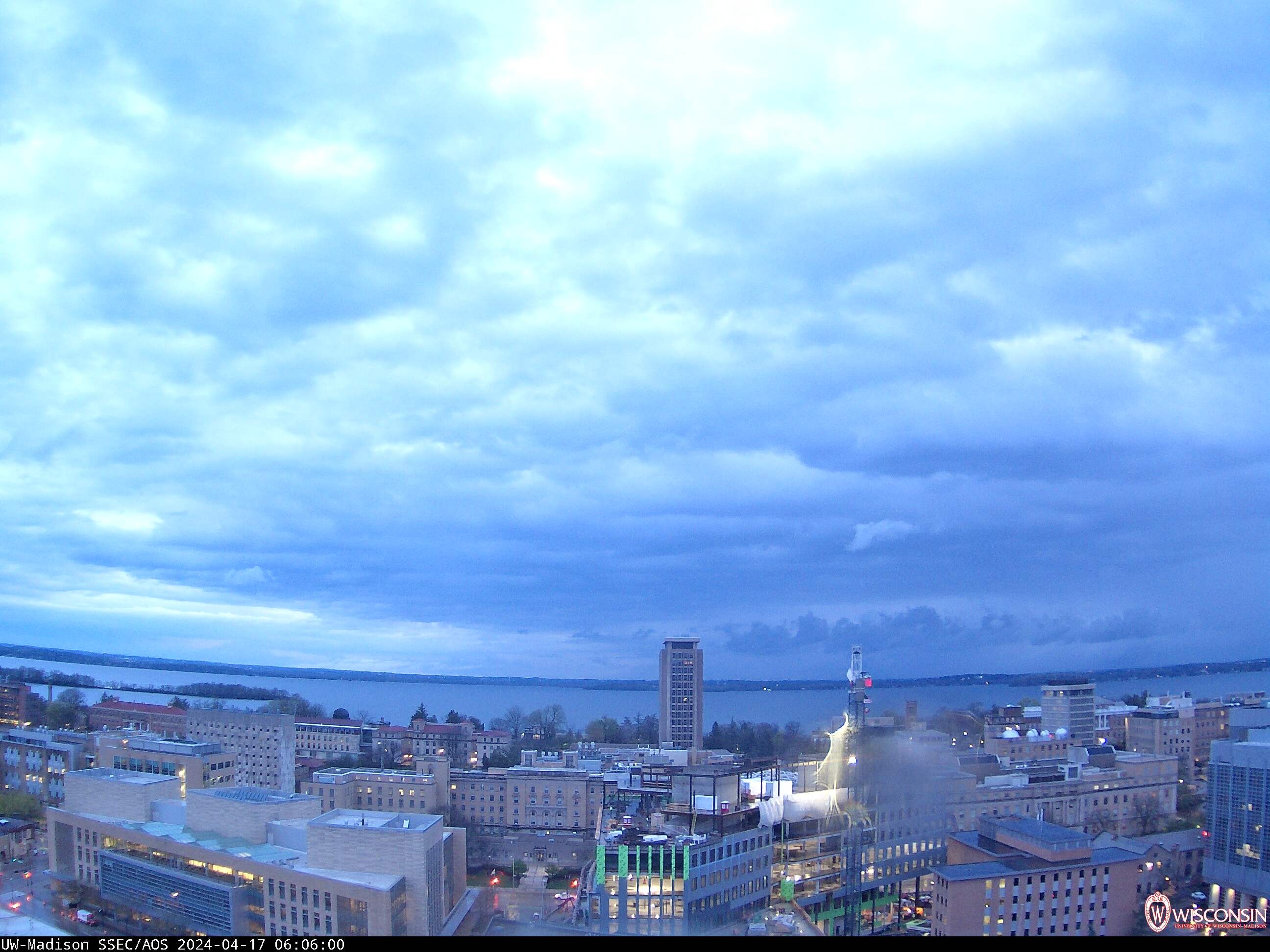
SSEC WebCam, north-facing, at 1555 UTC on 8 January 2016 (Click to enlarge)
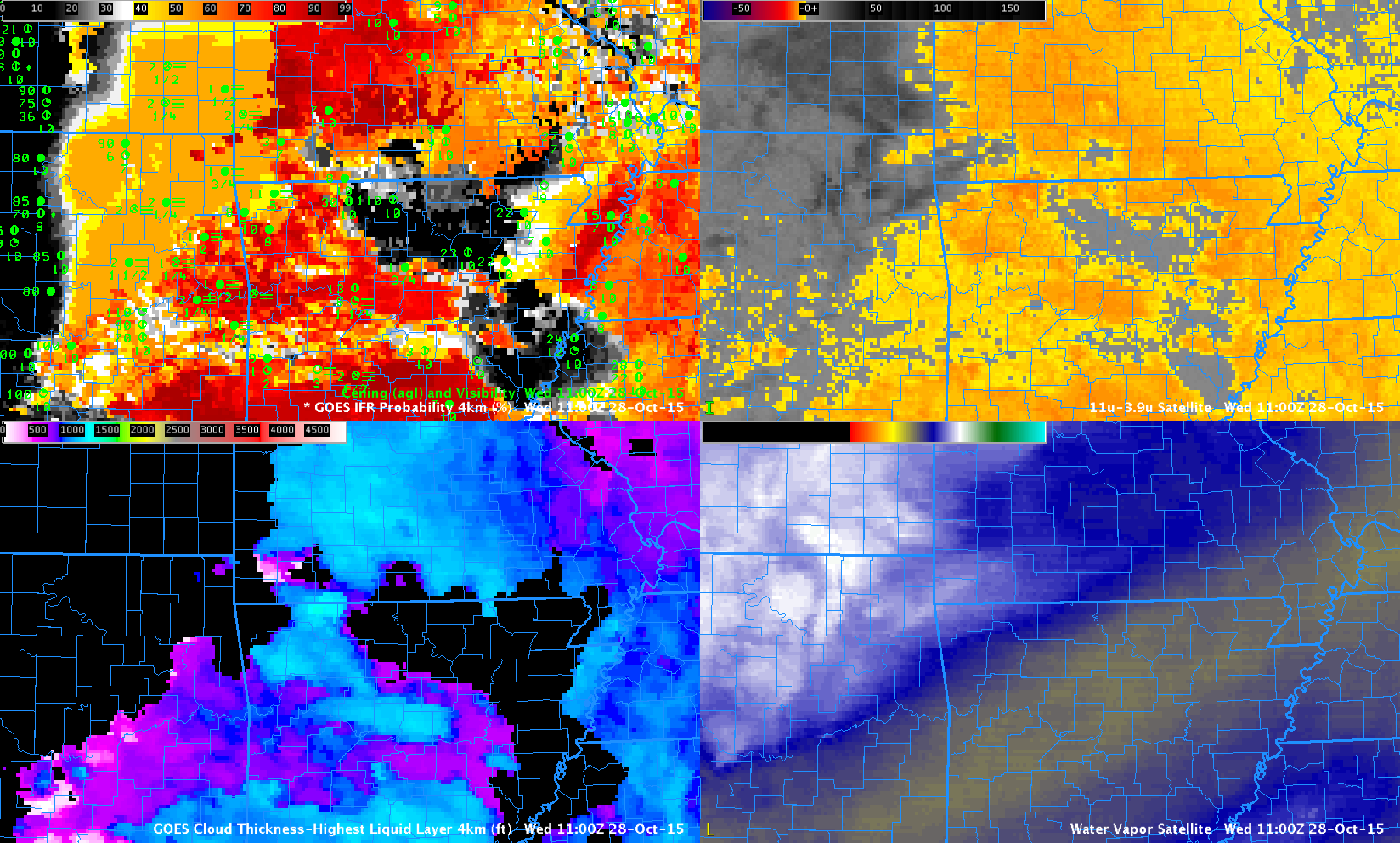
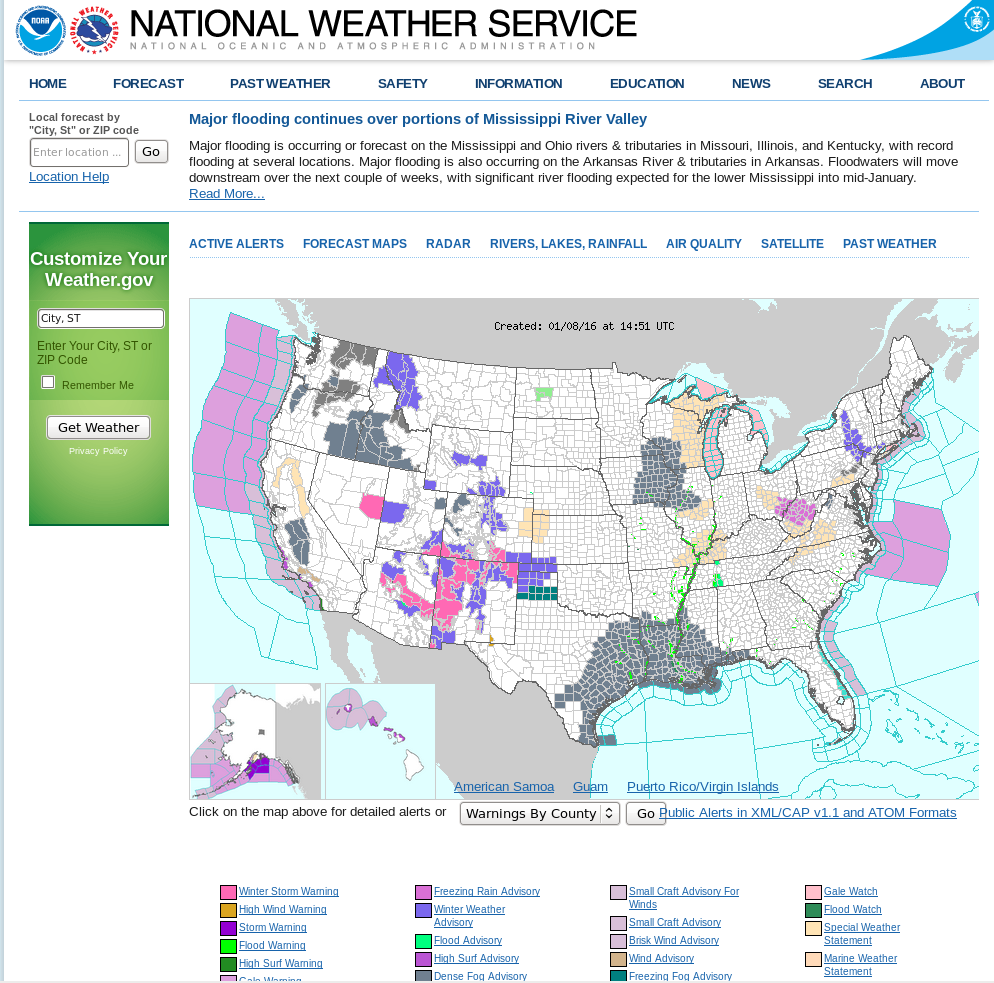
A storm in the Midwest that has drawn moist air northward (dewpoints exceed freezing over snowcover over much of the upper midwest) has caused advection fog over a wide area of the upper midwest. (The WebCam at SSEC in Madison WI (source) is shown above) Dense Fog Advisories (below) were issued by the Davenport, Des Moines, Lincoln and LaCrosse WFOs. Extratropical storm systems are usually accompanied by multiple cloud layers that prevent the satellite from viewing low stratus. For such events as these, only a fog-detection product that includes surface-based information will be useful. GOES-R IFR Probability fields, below, neatly outline the region of lowest visibilities and ceilings. As the highest probabilities push to the east over Wisconsin and Illinois, visibilities and ceilings both drop.
Other aspects of the animation below require comment. IFR Probability fields use predictors based on both satellite and model data; if one of those predictors cannot be used (satellite data, for instance, in regions where high clouds that mask the view of the near-surface), IFR Probability values will be suppressed. The relatively flat nature of the GOES-R IFR probability field over Iowa is characteristic of a field controlled mainly by Rapid Refresh Model output. But there are embedded regions of greater values of IFR Probability that propagate northward: these are regions where breaks in the higher/mid-level clouds allow the satellite to view low clouds, and satellite predictors are available to the algorithm, and probabilities can therefore be larger. Similarly, as the sun rises — at the end of the animation — IFR Probability in general increases as visible imagery can be used for more confident cloud-clearing. The algorithm yield higher probabilities of IFR Conditions because there is more confidence that a cloud is actually present.
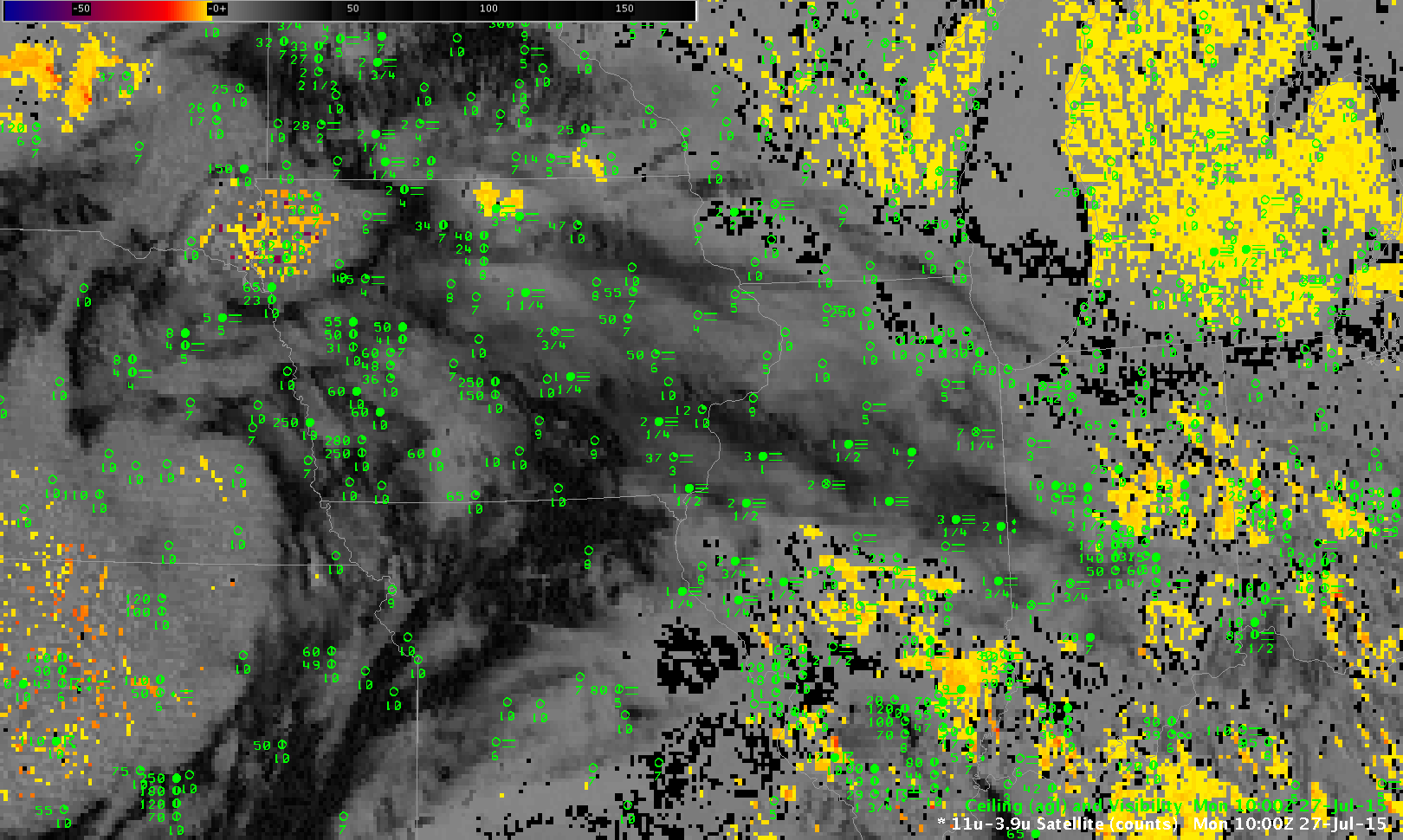
GOES-13 Brightness Temperature Difference values are shown below the IFR Probability field. There is little relationship between the Brightness Temperature Difference field and the reduced surface visibility/lowered ceilings. Note also how the character of the brightness temperature difference field changes as reflected solar radiance becomes important at sunrise.
Hourly GOES-R IFR Probability fields, 0200-1500 UTC on 8 January 2015 (Click to enlarge)
GOES-13 Brightness Temperature Difference (10.7 µm – 3.9 µm) Fields, 0800-1500 UTC on 8 January 2015 (Click to enlarge)

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}