 |
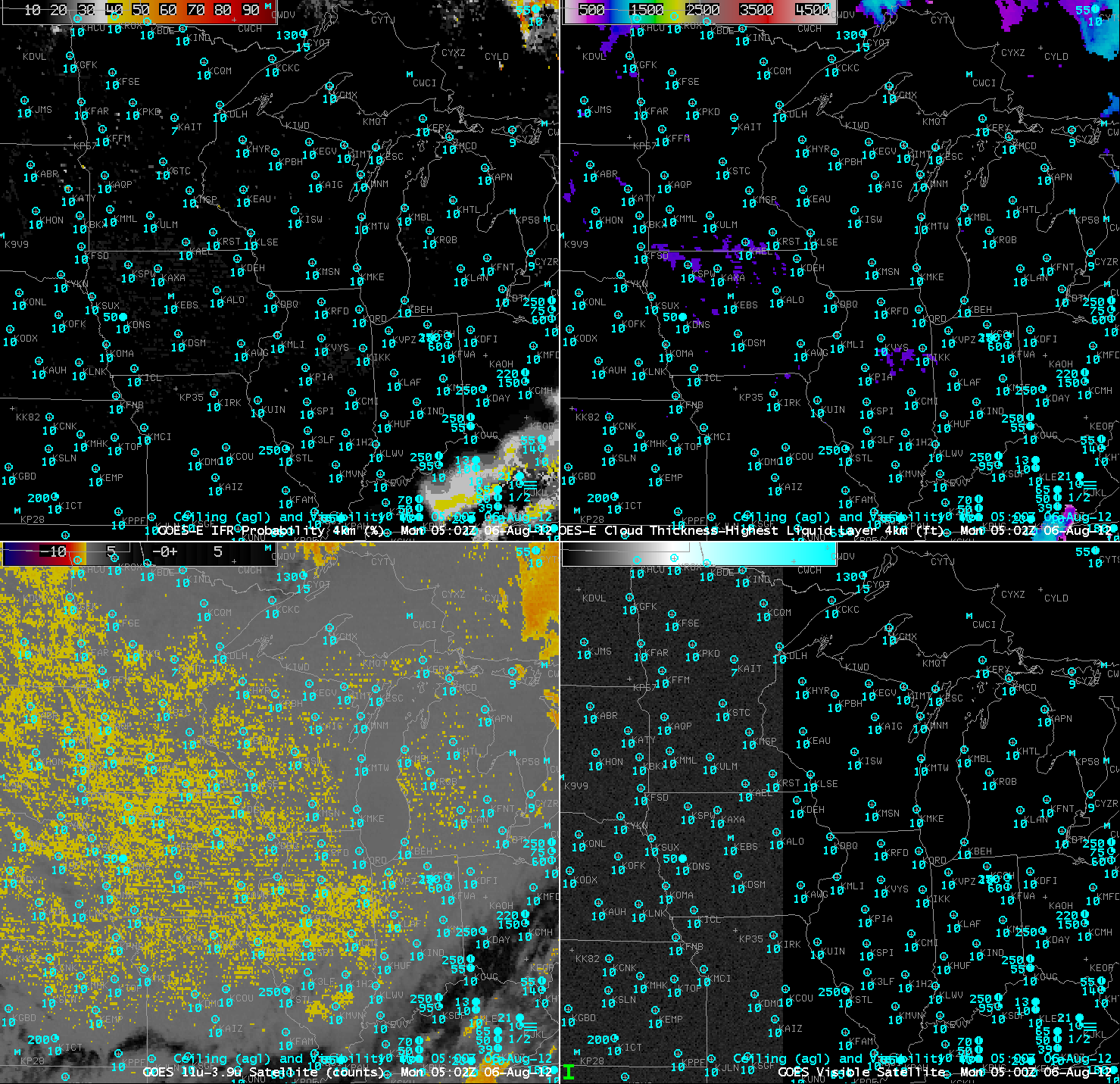
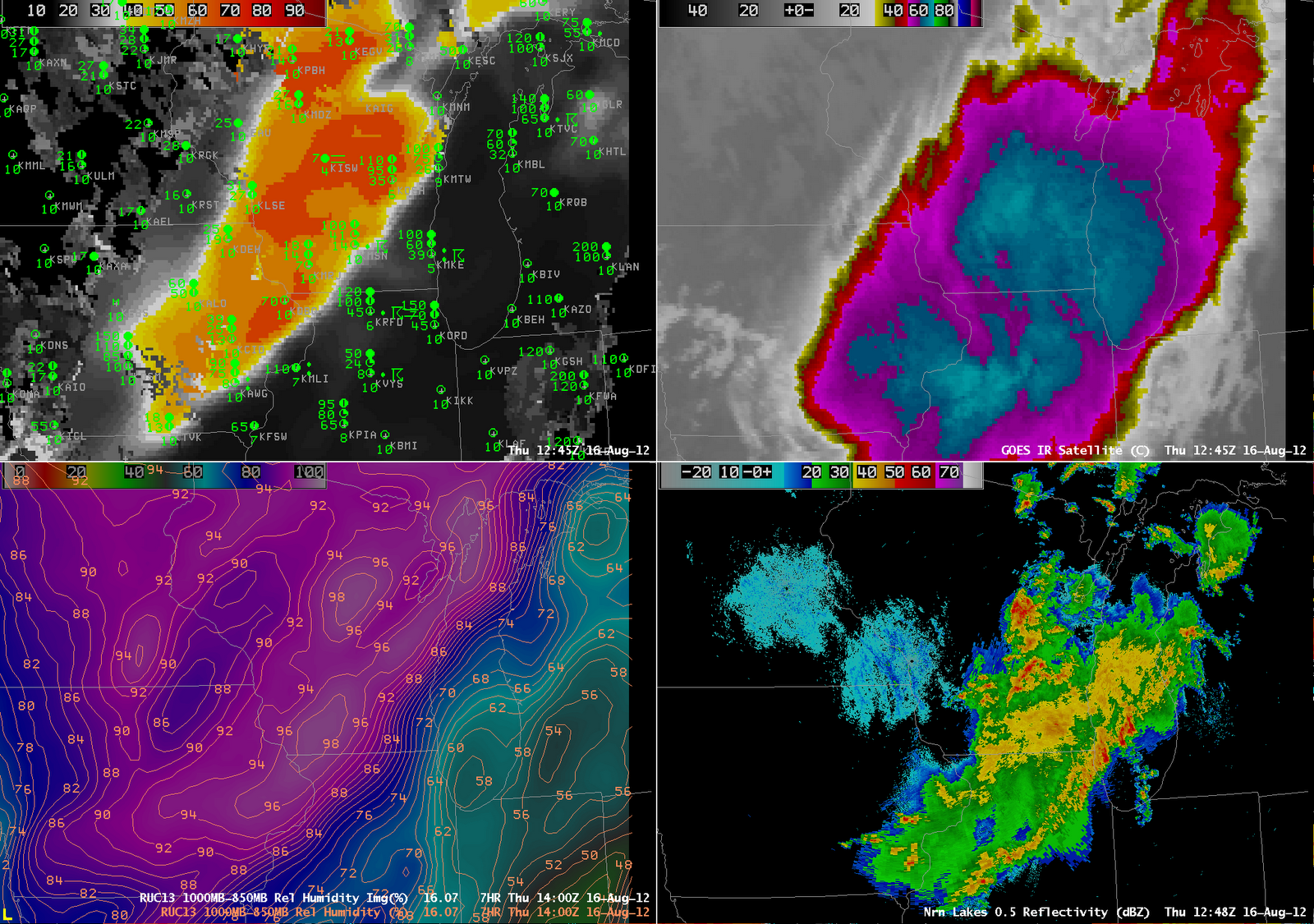
| GOES-R IFR Probabilities (Upper left), Enhanced GOES-East 10.7 micrometer imagery (Upper right), Rapid Refresh Mean Relative Humidity (1000-850 mb) (Lower left), Composite Radar Reflectivity (Lower right). Times as indicated. |
A large convective system moved over Wisconsin during the morning of 16 August 2012 and it illustrates the importance of fused data in diagnosing IFR conditions. The deep convective cloud precludes any satellite detection of low water-based clouds, so the traditional method of detecting fog/low stratus (the brightness temperature difference between 10.7 and 3.9 micrometers) cannot be used. In this case, model data, in the form of Rapid Refresh Relative Humidity, is used to fill in regions where satellite predictors cannot help. Note the observation of IFR conditions at Wisconsin Rapids (KISW); this is a region of very high model relative humidity. Model relative humidity is just as high over south-central Minnesota; in that region, however, satellite predictors do exist, and they do not suggest fog/low clouds, so the IFR probability there is comparitively lower.
The character of the IFR probability field is much less pixelated in regions where model data only are used as predictors. When satellite data and model data are used, as over northwest Wisconsin, for example, the pixelated nature of the satellite data becomes apparent.