Dense Fog Advisories were issued over parts of eastern North Dakota (Screenshot of Grand Forks National Weather Service Page) early on 9 October:
URGENT – WEATHER MESSAGE
NATIONAL WEATHER SERVICE GRAND FORKS ND
303 AM CDT FRI OCT 9 2015
NDZ006-007-014-015-024-028-038-091500-
/O.NEW.KFGF.FG.Y.0006.151009T0803Z-151009T1500Z/
/O.CON.KFGF.FR.Y.0011.000000T0000Z-151009T1400Z/
TOWNER-CAVALIER-BENSON-RAMSEY-EDDY-GRIGGS-BARNES-
INCLUDING THE CITIES OF…CANDO…LANGDON…FORT TOTTEN…
MADDOCK…LEEDS…MINNEWAUKAN…DEVILS LAKE…NEW ROCKFORD…
COOPERSTOWN…VALLEY CITY
303 AM CDT FRI OCT 9 2015
…DENSE FOG ADVISORY IN EFFECT UNTIL 10 AM CDT THIS MORNING…
…FROST ADVISORY REMAINS IN EFFECT UNTIL 9 AM CDT THIS MORNING…
THE NATIONAL WEATHER SERVICE IN GRAND FORKS HAS ISSUED A DENSE
FOG ADVISORY…WHICH IS IN EFFECT UNTIL 10 AM CDT THIS MORNING.
* TEMPERATURES…IN THE LOWER 30S.
* VISIBILITIES…AREAS OF VISIBILITY UNDER ONE QUARTER MILE.
VISIBILITIES WILL BE HIGHLY VARIABLE HOWEVER.
* TIMING…FOG WILL BURN OFF MID MORNING.
PRECAUTIONARY/PREPAREDNESS ACTIONS…
A FROST ADVISORY MEANS THAT WIDESPREAD FROST IS EXPECTED.
SENSITIVE OUTDOOR PLANTS MAY BE KILLED IF LEFT UNCOVERED.
A DENSE FOG ADVISORY MEANS VISIBILITIES WILL FREQUENTLY BE
REDUCED TO LESS THAN ONE QUARTER MILE. IF DRIVING…SLOW DOWN…
USE YOUR HEADLIGHTS…AND LEAVE PLENTY OF DISTANCE AHEAD OF YOU.
&&
$$
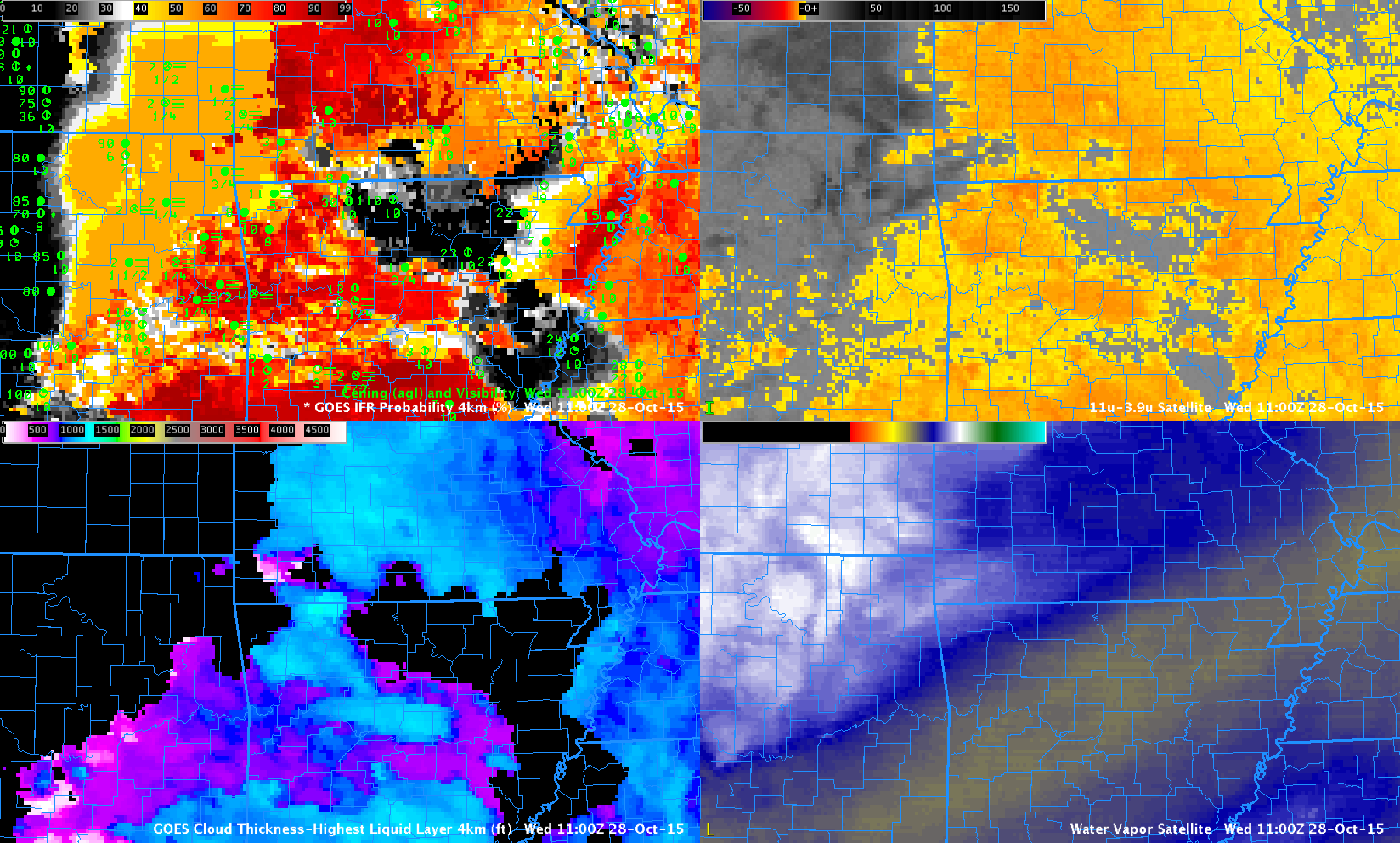
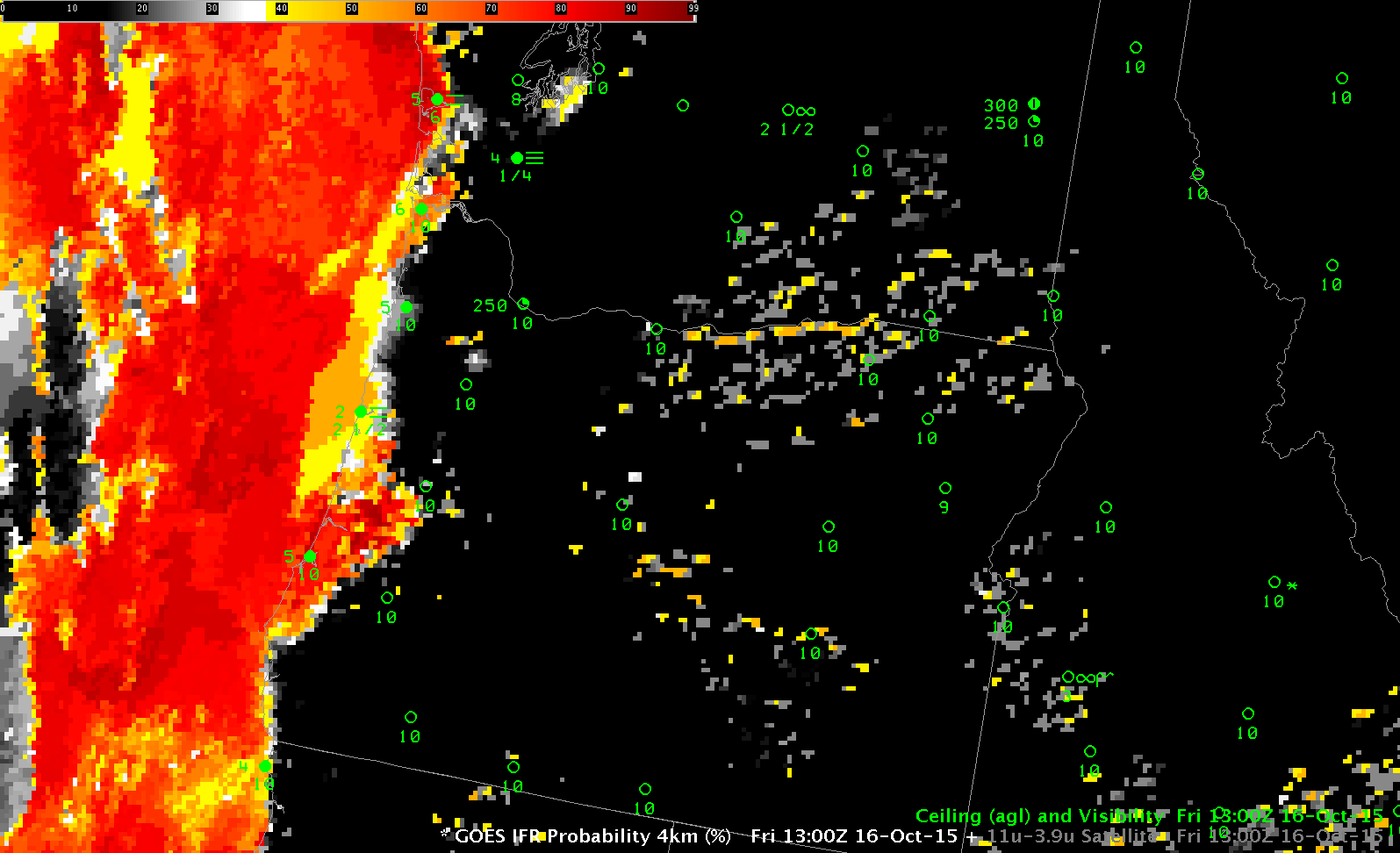
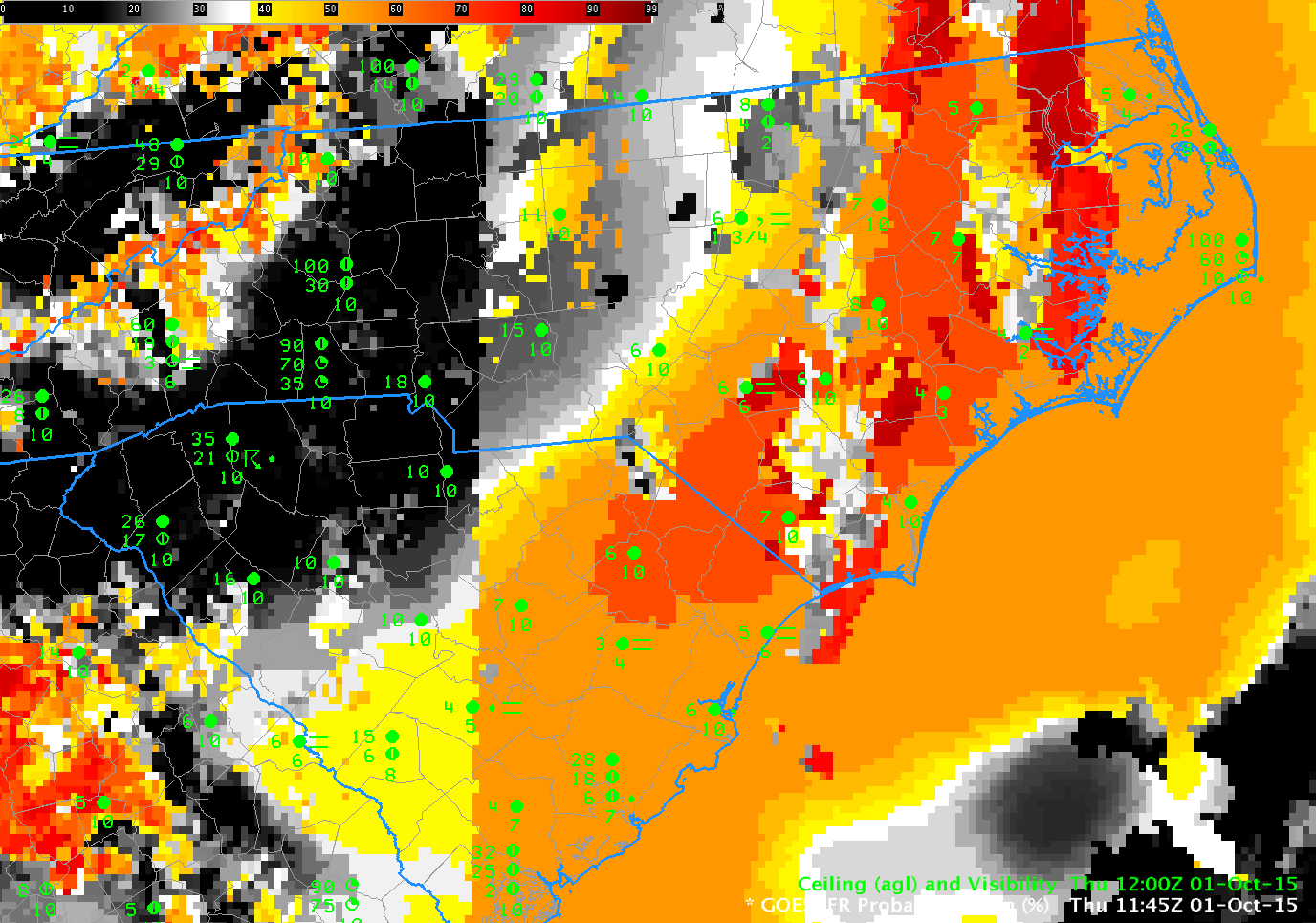
GOES-R IFR Probability Fields and surface reports of ceilings and visibilities, 0200-1100 UTC (Click to enlarge)
The GOES-R IFR Probability fields increased in this region as the fog developed (above). Notably in this case, IFR probabilities were lower over Minnesota and the Red River Valley where mid-level stratus was occurring. The toggle below compares IFR Probabilities and Brightness Temperature Differences at four times during the night. The Brightness Temperature Difference fields (animation from 0400-1100 UTC is here) greatly overpredict the region of dense fog. Because the IFR Probabilities incorporate information about the surface, however, regions of mid-level stratus can be screened out. These are regions where the Rapid Refresh model does not show saturation in the lowest layers.
Note that Cirrus is overspreading the region from the west at the end of the animations. High Clouds change the signal in the brightness temperature difference field. Harvey ND at 1100 UTC reports Zero visibility and an obscured ceiling (with freezing drizzle). The station is under cirrus, however, so a brightness temperature difference signal associated with fog is not present. There is a modest IFR Probability value there because data from the Rapid Refresh suggests low-level saturation is occurring.
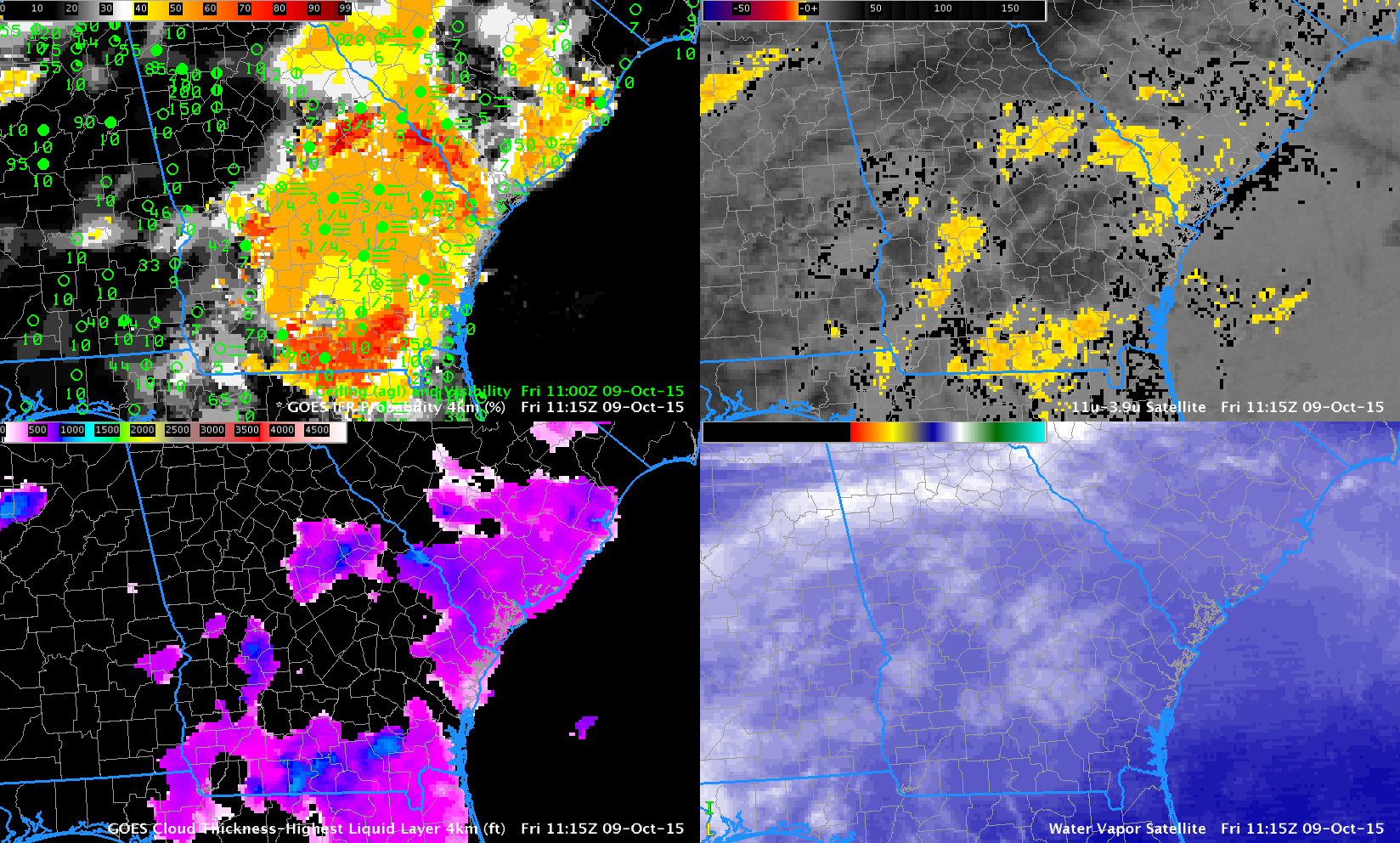
GOES-13 Brightness Temperature Difference fields and GOES-R IFR Probability Fields at 0400 (Upper Left), 0615 (Upper Right), 0800 (Lower Left) and 1100 (Lower Right) [Click to enlarge]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}