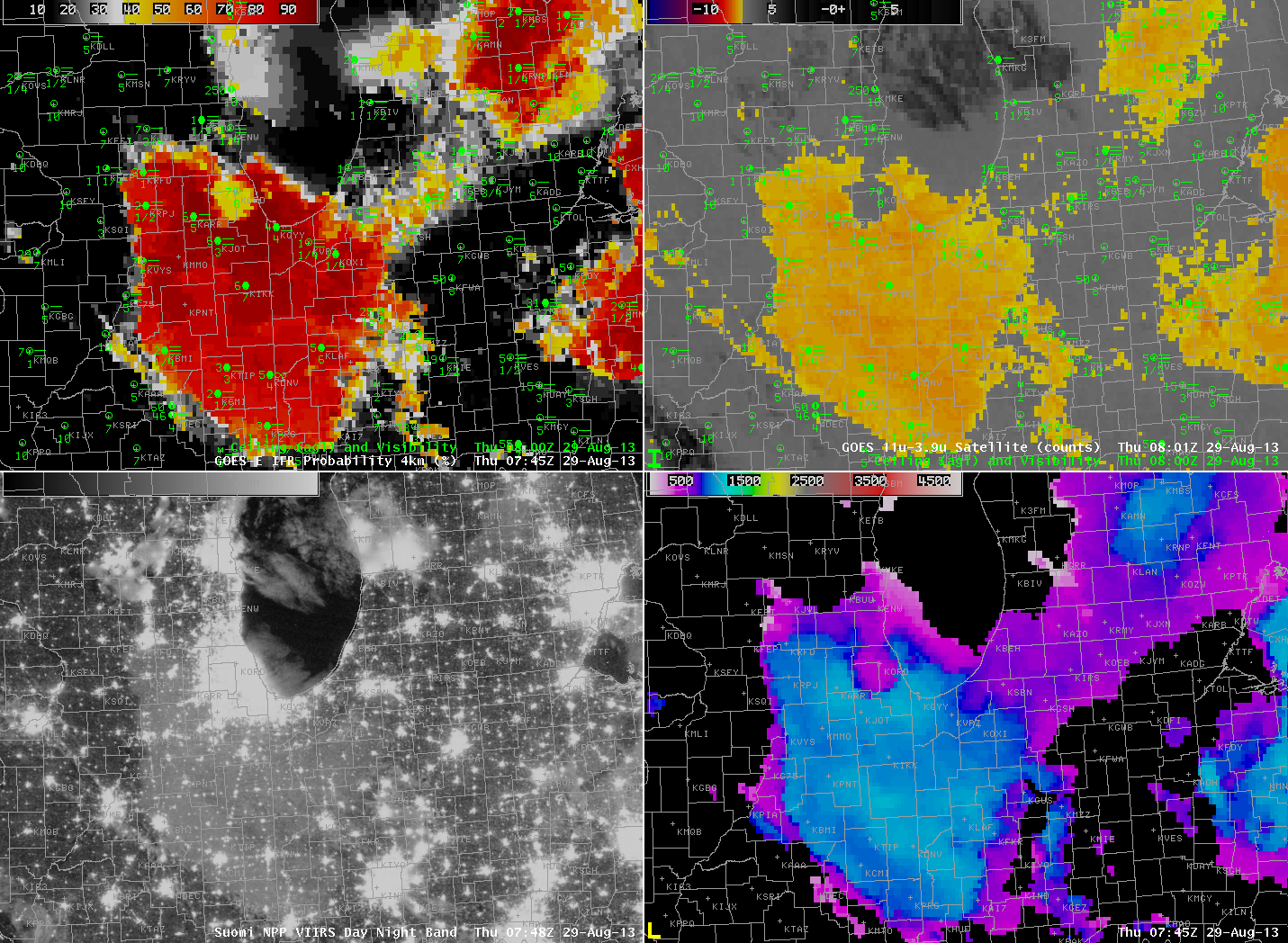
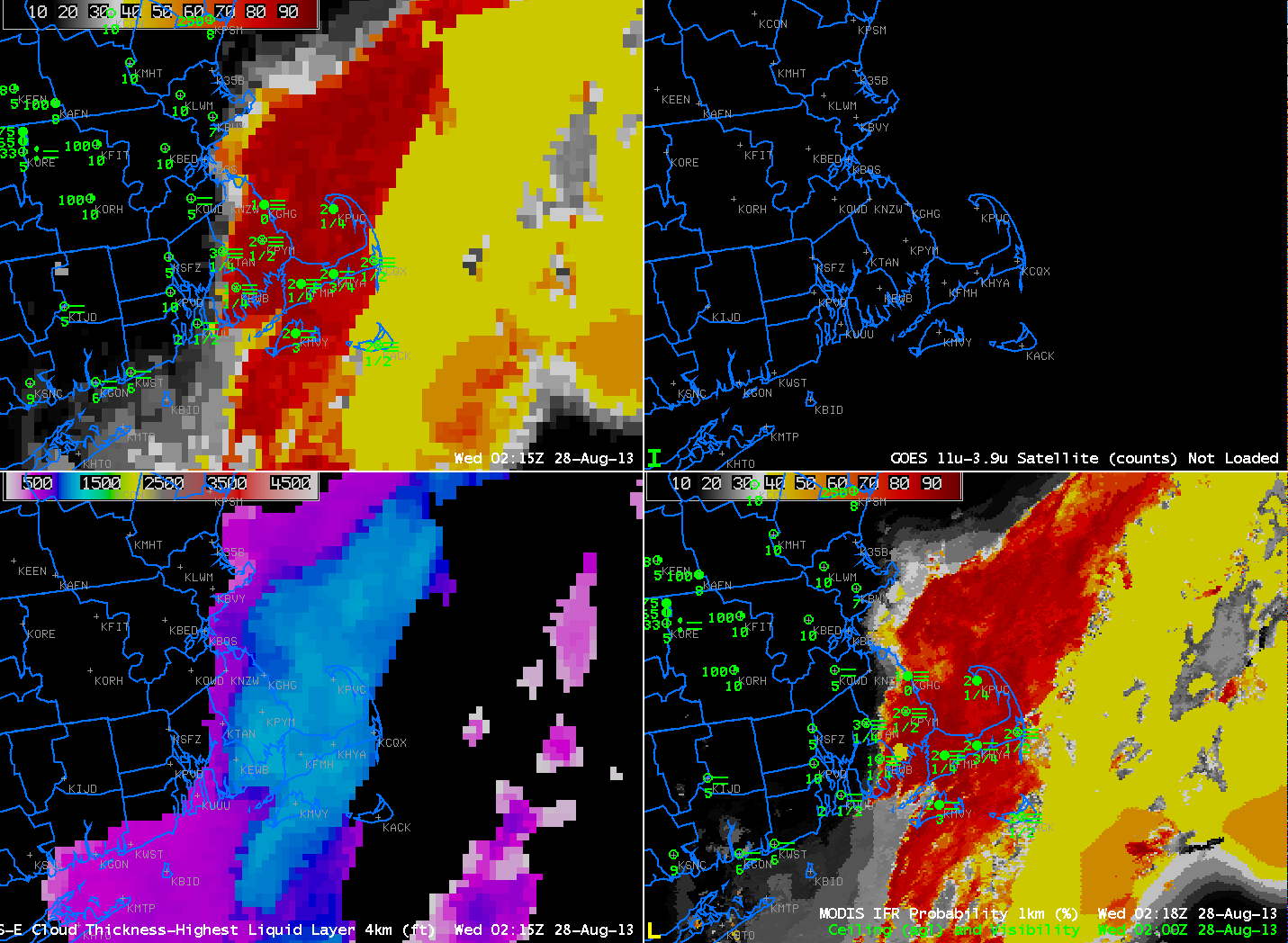
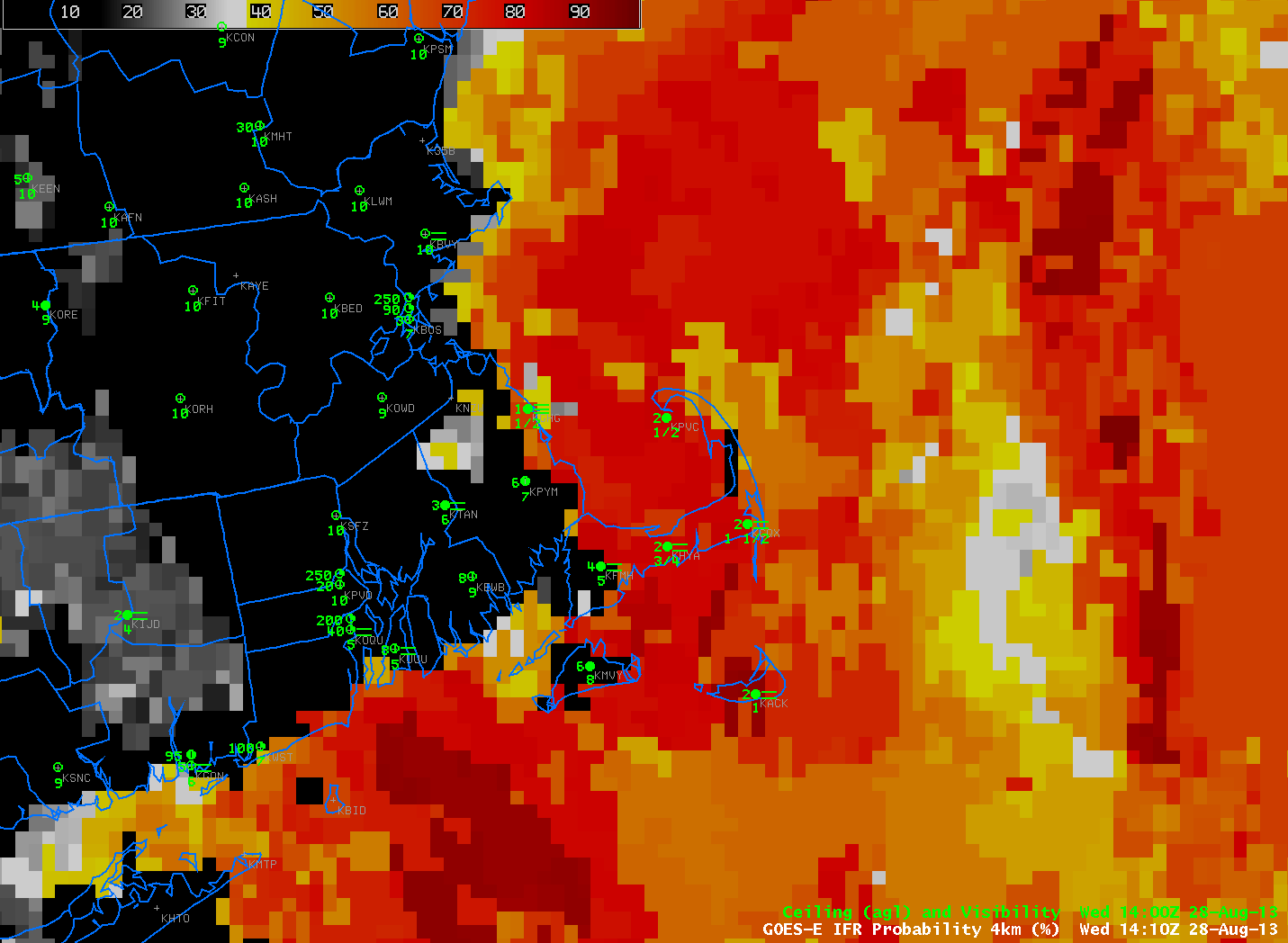
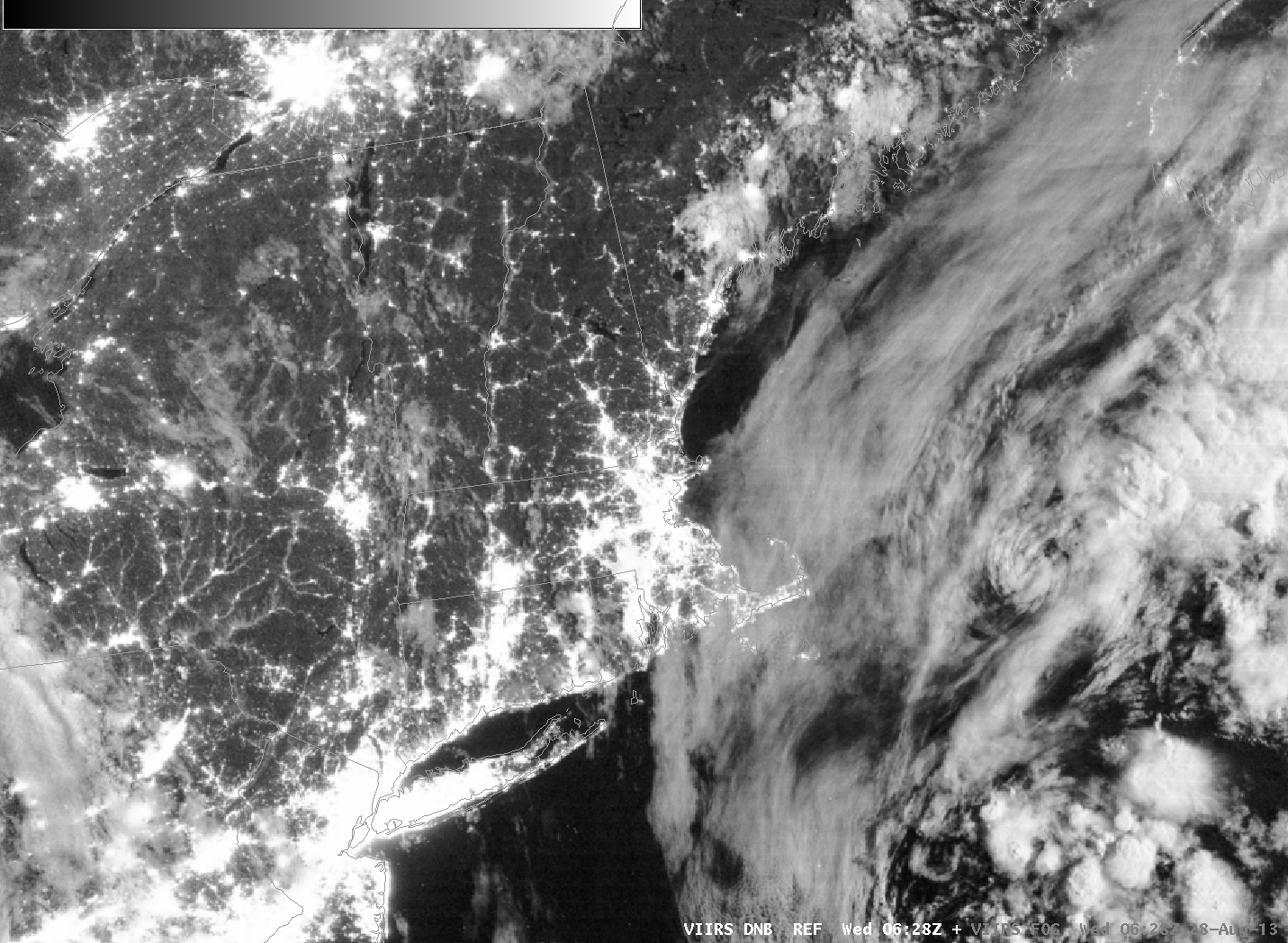
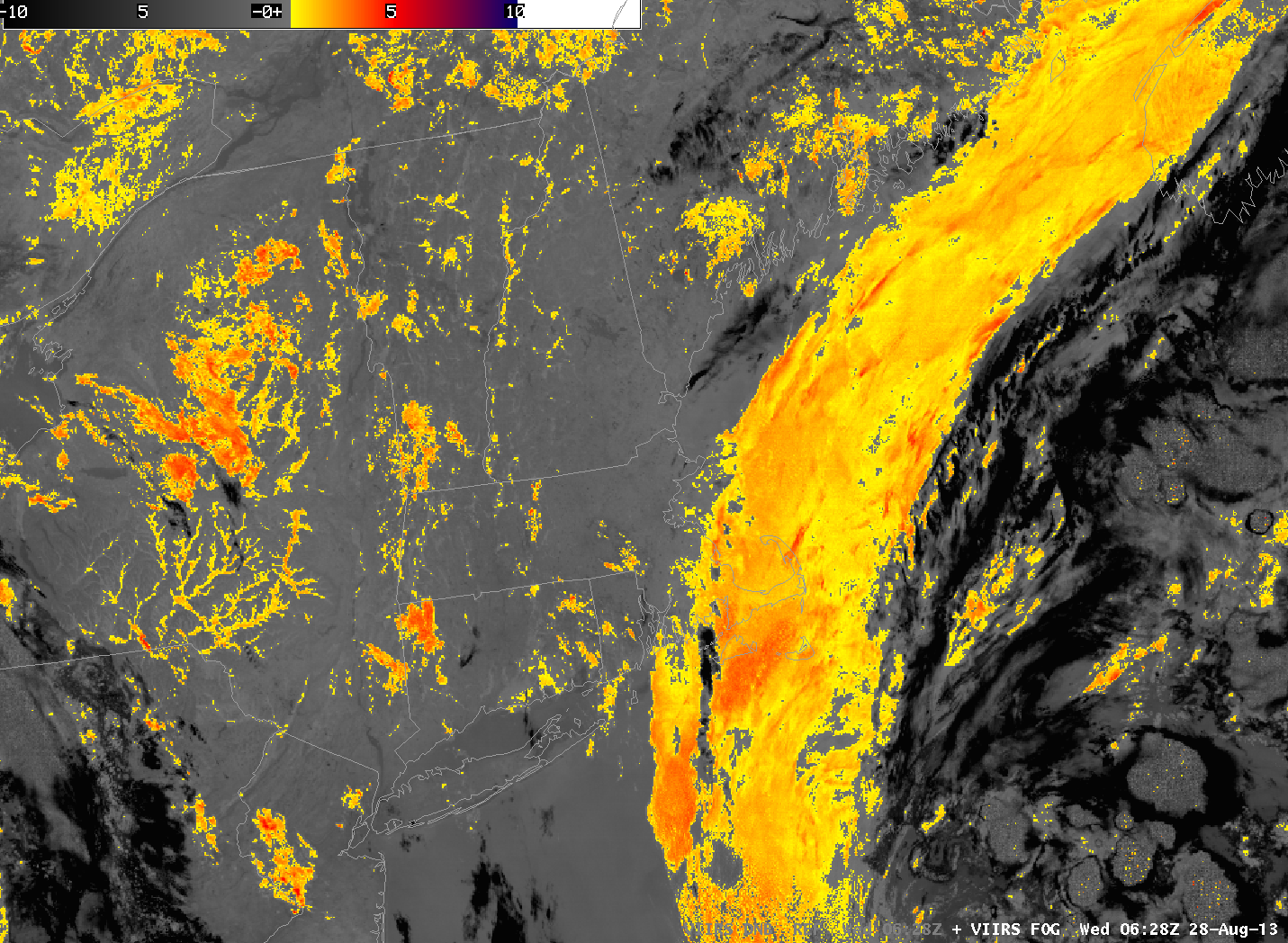
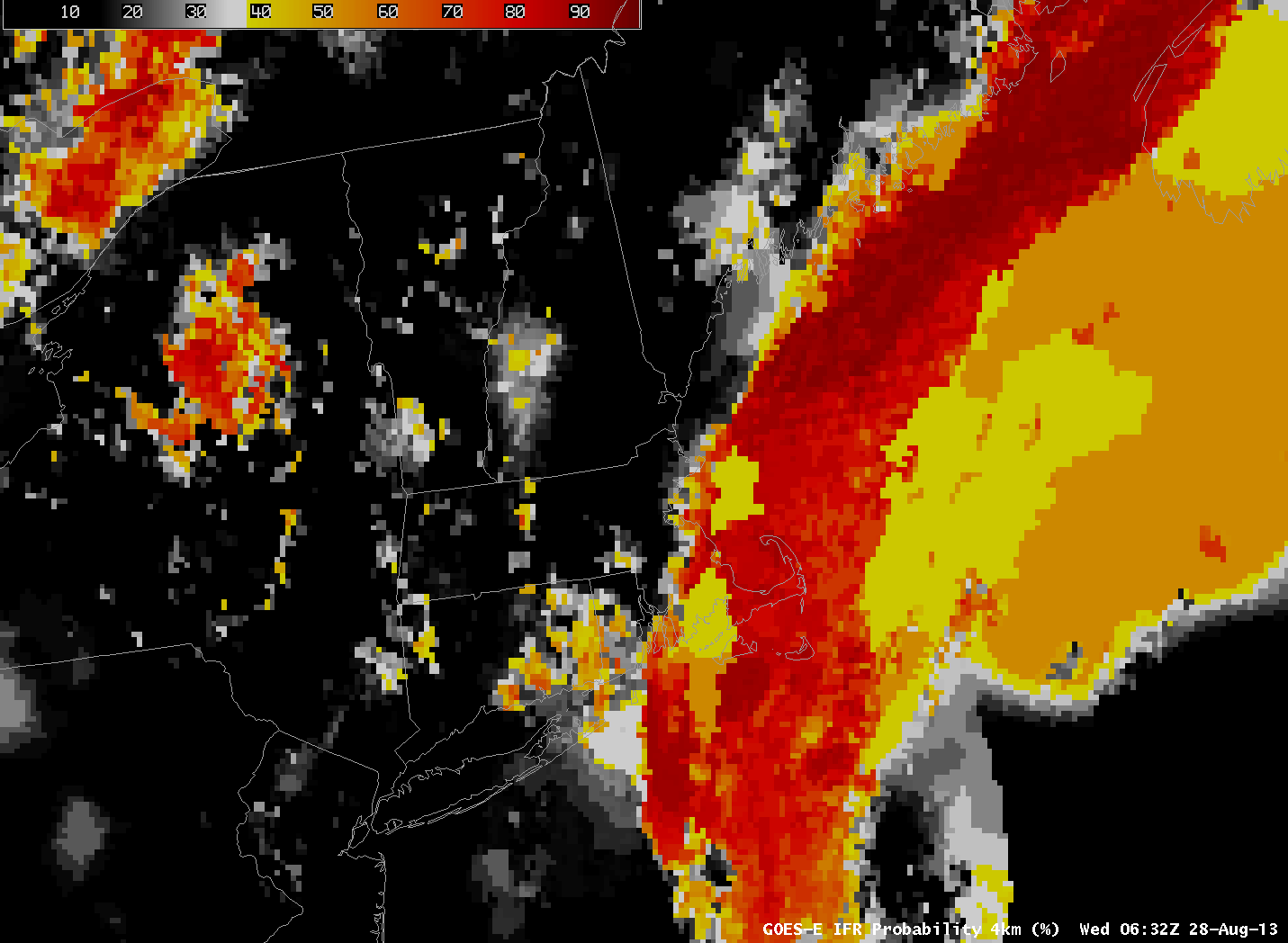
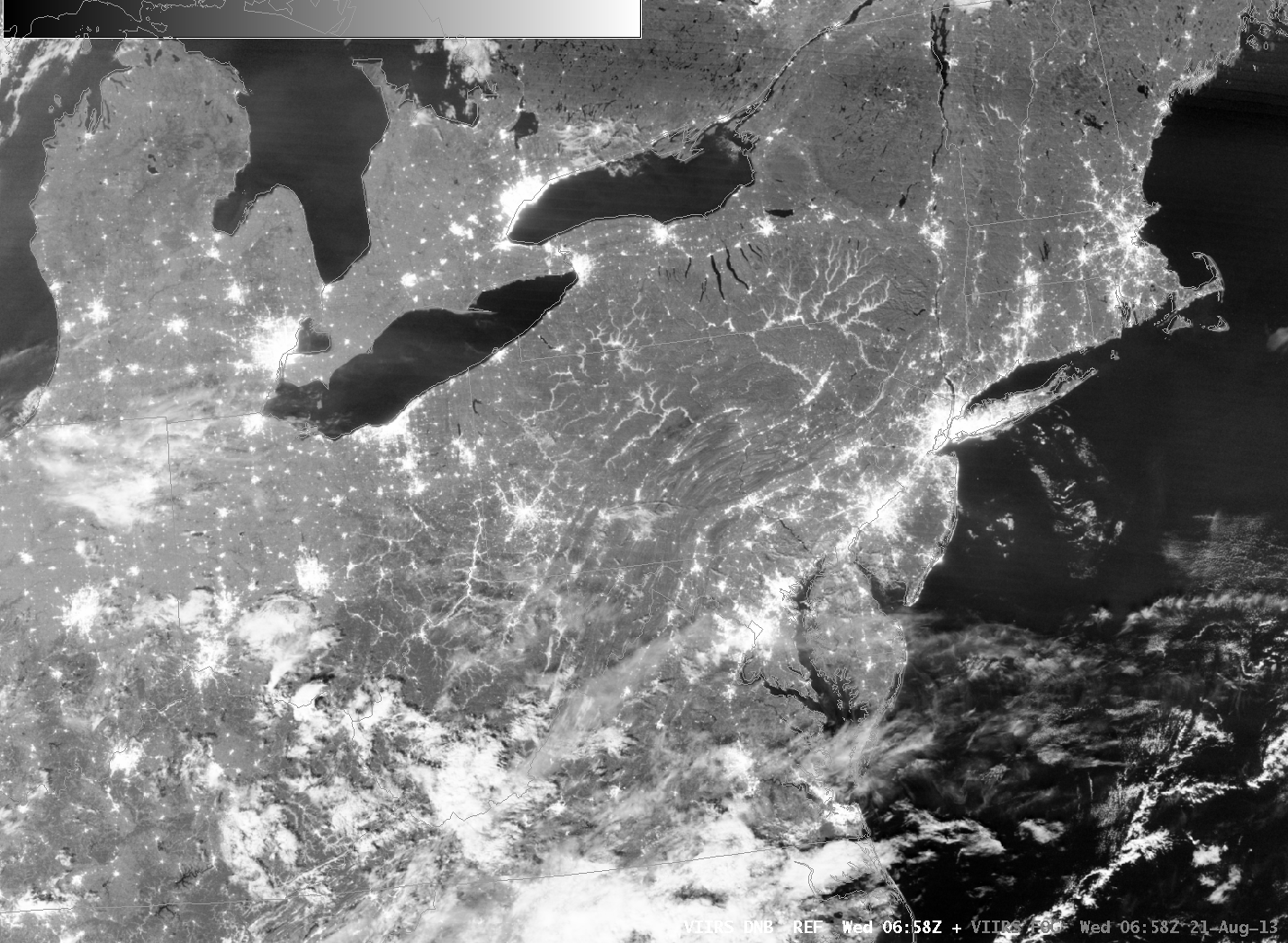
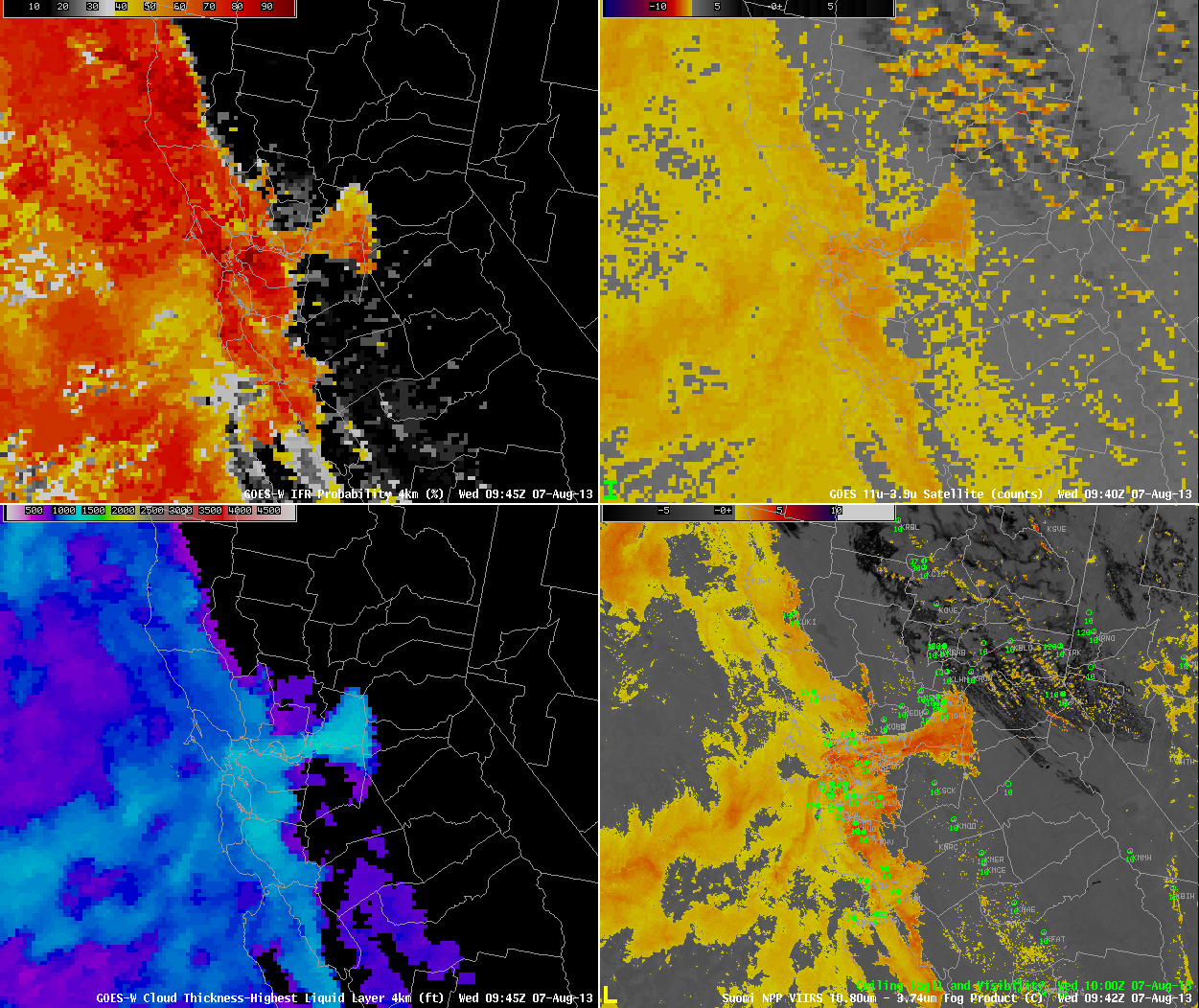
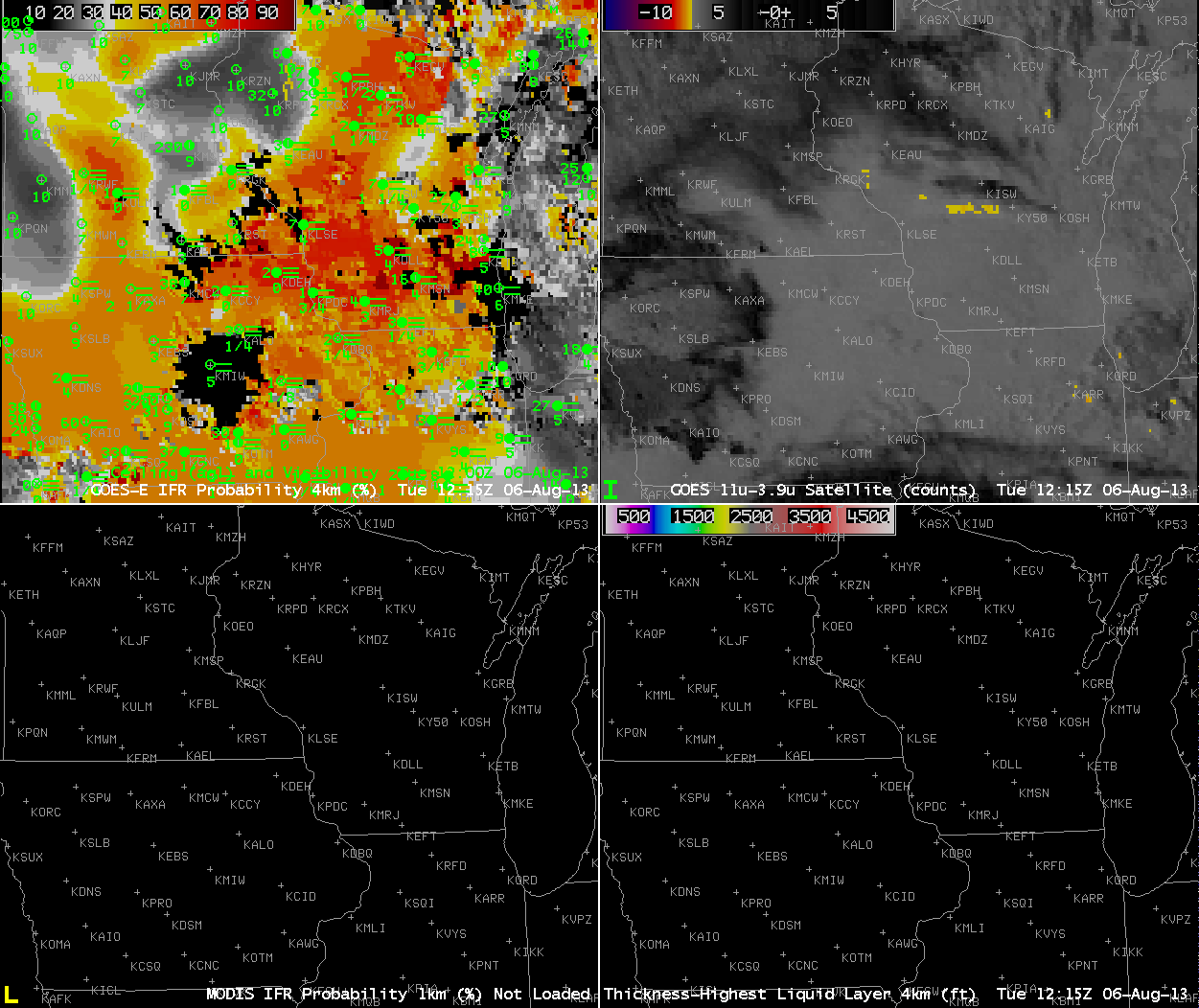
Dense fog developed overnight over NW Indiana and adjacent regions. The GOES-R IFR Probability Product highlighted the regions with the densest fog, refining somewhat the regions highlighted by the brightness temperature difference, the heritage fog-detection product. The image above shows the IFR Probability (Upper Left), Brightness Temperature Difference (Upper Right), Day/Night Imagery from Suomi/NPP (Lower Left) and GOES-R Cloud Thickness (Lower Right). Forecast offices were alert to the possibility of fog, as shown in AFDs from LOT (Chicago) and IWX (Northern Indiana)
000
FXUS63 KIWX 290619
AFDIWX
AREA FORECAST DISCUSSION
NATIONAL WEATHER SERVICE NORTHERN INDIANA
219 AM EDT THU AUG 29 2013
.SYNOPSIS…
ISSUED AT 137 AM EDT THU AUG 29 2013
AN UPPER LEVEL RIDGE WILL CONTINUE ACROSS THE MIDWEST…CAUSING
TEMPERATURES TO STAY MUCH ABOVE NORMAL WITH DRY CONDITIONS. HIGHS
TODAY AND FRIDAY WILL BE IN THE MID 80S TO LOWER 90S. LOWS TONIGHT
WILL BE AROUND 65 DEGREES.
&&
.UPDATE…
ISSUED AT 137 AM EDT THU AUG 29 2013
UPDATED THE GRIDS/FCST TO MENTION AREAS OF FOG DEVELOPING.
CLEARING SKIES OVER MUCH OF THE AREA COMBINED WITH RESIDUAL
MOISTURE AND LIGHT WINDS FAVOR FOG FORMATION. CURRENT THINKING IS
THE FOG EXPECTED TO BECOME WIDESPREAD BY LATE TONIGHT…AND WILL
PROBABLY BECOME DENSE IN AREAS. HAVE HELD OFF ON A DENSE FOG
ADVISORY TO TRY TO GET A BETTER IDEA WHERE THE FOG WILL FORM…
ESPECIALLY AS SOME CLOUDS LINGER OVER NRN INDIANA.
000
FXUS63 KLOT 290906
AFDLOT
AREA FORECAST DISCUSSION
NATIONAL WEATHER SERVICE CHICAGO/ROMEOVILLE IL
406 AM CDT THU AUG 29 2013
.DISCUSSION…
324 AM CDT
THE FORECAST CHALLENGES INCLUDE FOG IN THE NEAR TERM…THEN
INCREASING TEMPS AND THUNDERSTORM CHANCES FRIDAY…FOLLOWED BY A
COOL DOWN AND RETURN TO MORE SEASONABLE CONDITIONS TOWARD END OF THE
HOLIDAY WEEKEND.
GOES IMAGERY THIS MORNING SHOWS EXPANDING AREA OF STRATUS ACROSS
MUCH OF THE FORECAST AREA WITH SURFACE OBS AND WEBCAMS SHOWING A
SMATTERING OF DENSE FOG HERE AND THERE. ALL INDICATIONS ARE THAT THE
STRATUS IS THIN AND SHOULD BURN OFF QUICKLY THIS MORNING EXPECT NEAR
THE LAKE FRONT WHERE MARINE STRATUS AND POSSIBLY EVEN SOME FOG COULD
HOLD ON INTO THE AFTERNOON. ANOTHER COMPARATIVELY COOL DAY NEAR THE
LAKE WITH 70S RANGING QUICKLY UPWARD TO 80S INLAND JUST A FEW MILES
WITH UPPER 80S TO NEAR 90 EXPECTED SOUTHERN AND WESTERN PORTIONS OF
THE CWA.
GOES-R IFR Probability (Upper Left), GOES-East Brightness Temperature Difference (Upper Right), Suomi/NPP Day/Night Band (Lower Left), GOES-R Cloud Thickness (Lower Right) (click image to play animation)
Aspects of the loop above require comment. Note that initially there is a region of enhanced brightness temperature difference over northern Indiana, between Fort Wayne (KFWA) and Muncie (KMIE), in a region where IFR conditions are not reported. The GOES-R IFR Probabilities in this region are very small (correctly), likely reflecting the influence of the Rapid Refresh model on the IFR Probability product. In other words, this is a region for which the model is not predicting low-level saturation, at least early in the evening. The Brightness Temperature Difference signal is likely a result of elevated stratus.
Later on in the animation, IFR probabilities start to increase between NW Indiana and Saginaw MI, a region where visibilities are decreasing but where the brightness temperature difference, initially, has little signal.
In this case, the IFR Probability Fields improved on the Brightness Temperature Difference predictions — suppressing a signal in regions of stratus, and developing a signal before a signal is present in the brightness temperature difference field alone. This is the power of a fused data product.
The IFR Probability field will also provide a consistent signal through sunrise.
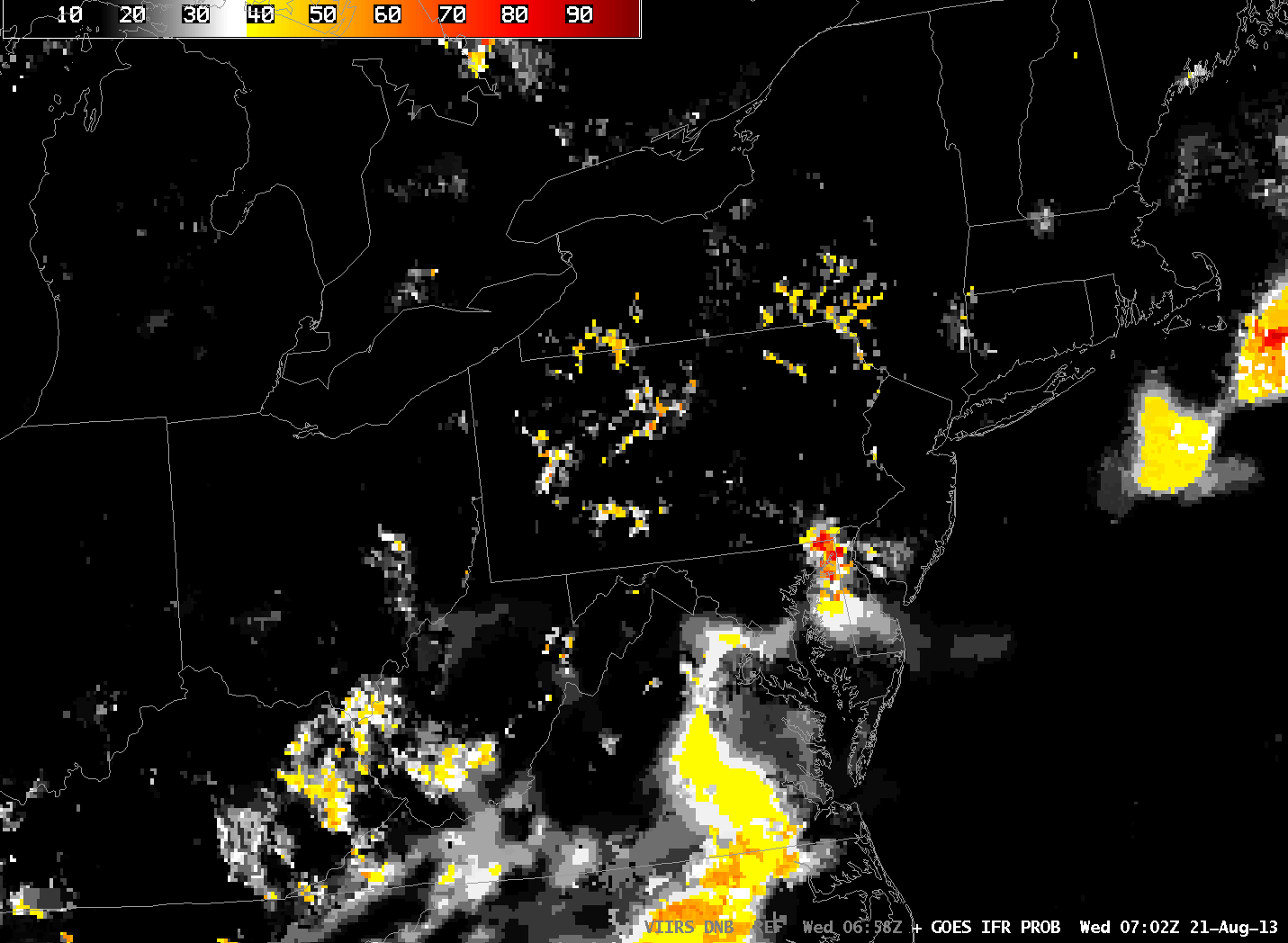
Fog dissipation is shown in the animation below (Click the image to start the animation). Cloud thickness is especially thick over central Illinois, and fog was slow to burn off there. Stratus also persisted over southern Lake Michigan.
")
")
 (Click to see animation)")
")
")
")
, GOES-West Brightness Temperature Difference (Upper Right, 10.7 µm - 3.9 µm), GOES-R Cloud Thickness (Lower Left), Suomi/NPP Brightness Temperature Difference (click image to play animation)")
, GOES-East Brightness Temperature Difference (Upper Right, 10.7 µm - 3.9 µm), MODIS-based GOES-R IFR Probabilities (Lower Left), GOES-based GOES-R Cloud Thickness (Lower Right) (click image to play animation)")
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}