The toggle above shows early-morning (1411 UTC, i.e., 9:11 AM EDT) Fog in valleys over northern Pennsylvania and the southern tier of upstate New York. IFR Probability fields neatly overlap the regions of reduced ceilings and visibilities, with some exceptions in the narrow river valleys where visible imagery (with 0.5-km resolution at nadir) can easily resolve tendrils of fog; infrared data (with nadir resolution of 2 km) used by IFR Probability struggles to identify fog in those regions. The thickest fog is indicated over Lake Ontario.
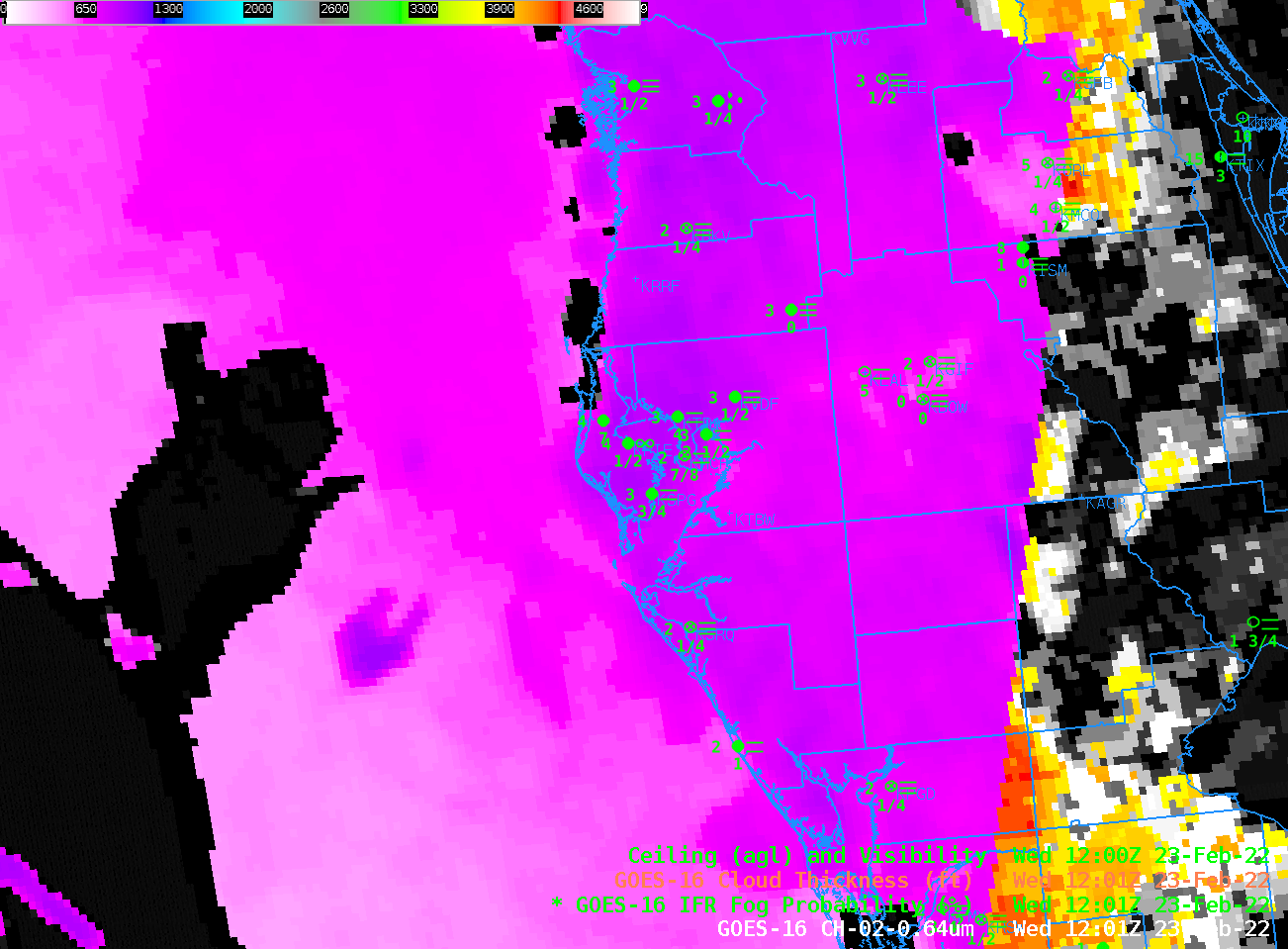
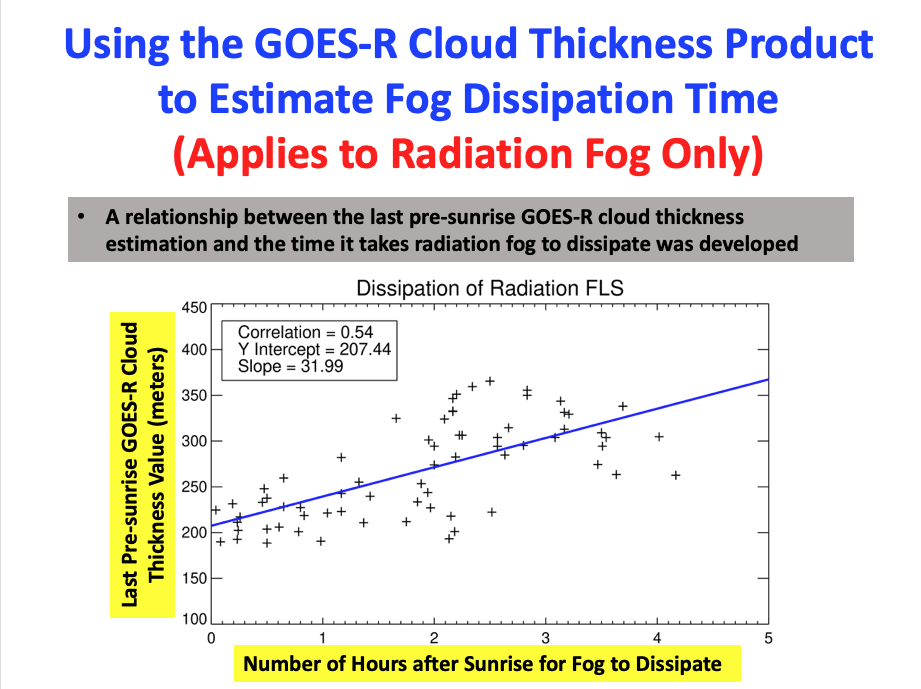
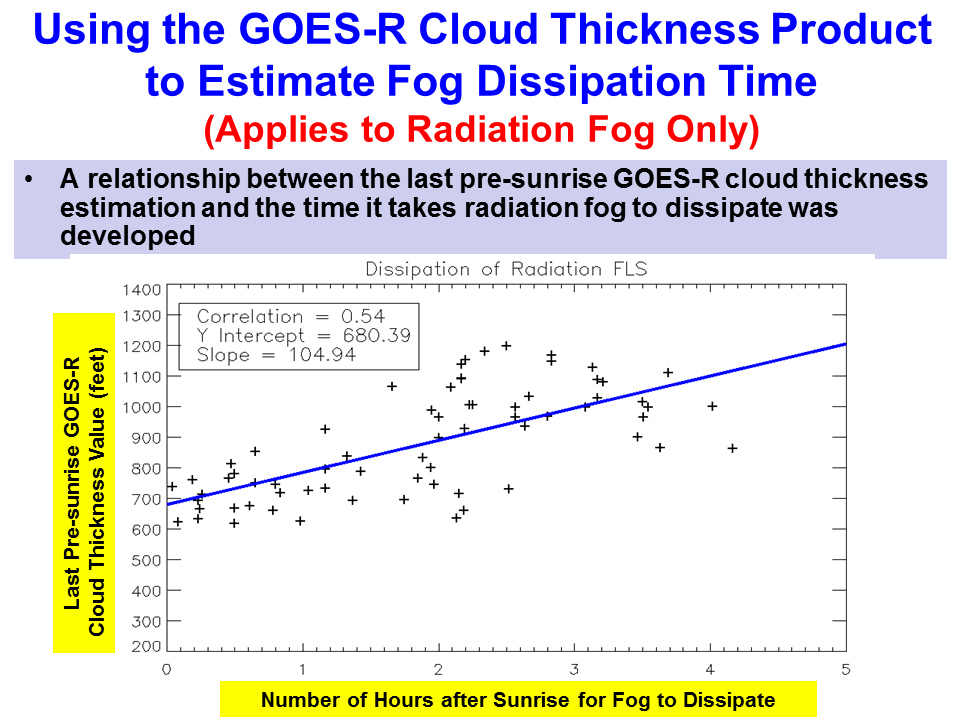
Cloud Thickness fields can be used to estimate when fog will dissipate. If you observe the last image before sunrise (Cloud Thickness is not computed for a time period when the sun rises — or sets — because of rapid changes in the reflected component of shortwave infrared — 3.9 µm — solar radiation). Note in the image the diagnosed thinness to the fog over the river valleys. You might expect that fog to dissipate first. Cloud Thickness is not computed in regions of multiple cloud layers, such as, in this case, southwestern Ontario, where only the IFR Probability field is shown.
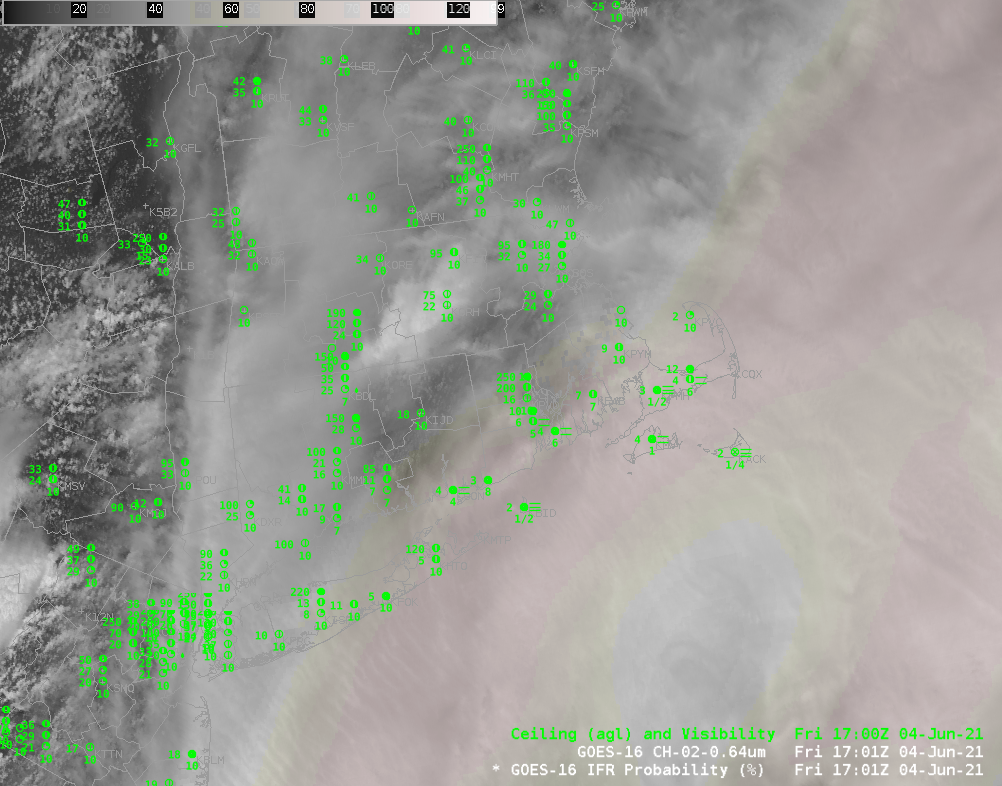
What did things look like at 1700 UTC, after the daily rise in temperature had caused substantial erosion of fog? The image below shows fog persisting over Lake Ontario, where IFR Probabilities are uniformly high. IFR conditions persist north of the lake but the southern shore of Lake Ontario shows less obstruction; one might (correctly!) infer southerly winds over the region. Indeed, Rochester and Buffalo both show southerly winds and dewpoints near 40. Toronto on the north shore of Lake Ontario has light southeast winds and fog at this time. There is a noteworthy east-west boundary in IFR Probability to the south of Wiarton, Ontario (METAR CYVV with 2-mile visibility and a 3500-foot ceilings, the station just south of the Bruce Peninsula). Careful inspection of the visible imagery there reveals an east-west cirrus cloud, so that IFR Probability is being computed mostly with output from the Rapid Refresh model there; the model is indicating low-level saturation so IFR Probabilities are large. Just to the south, clouds are not indicated, so IFR Probabilities are small.
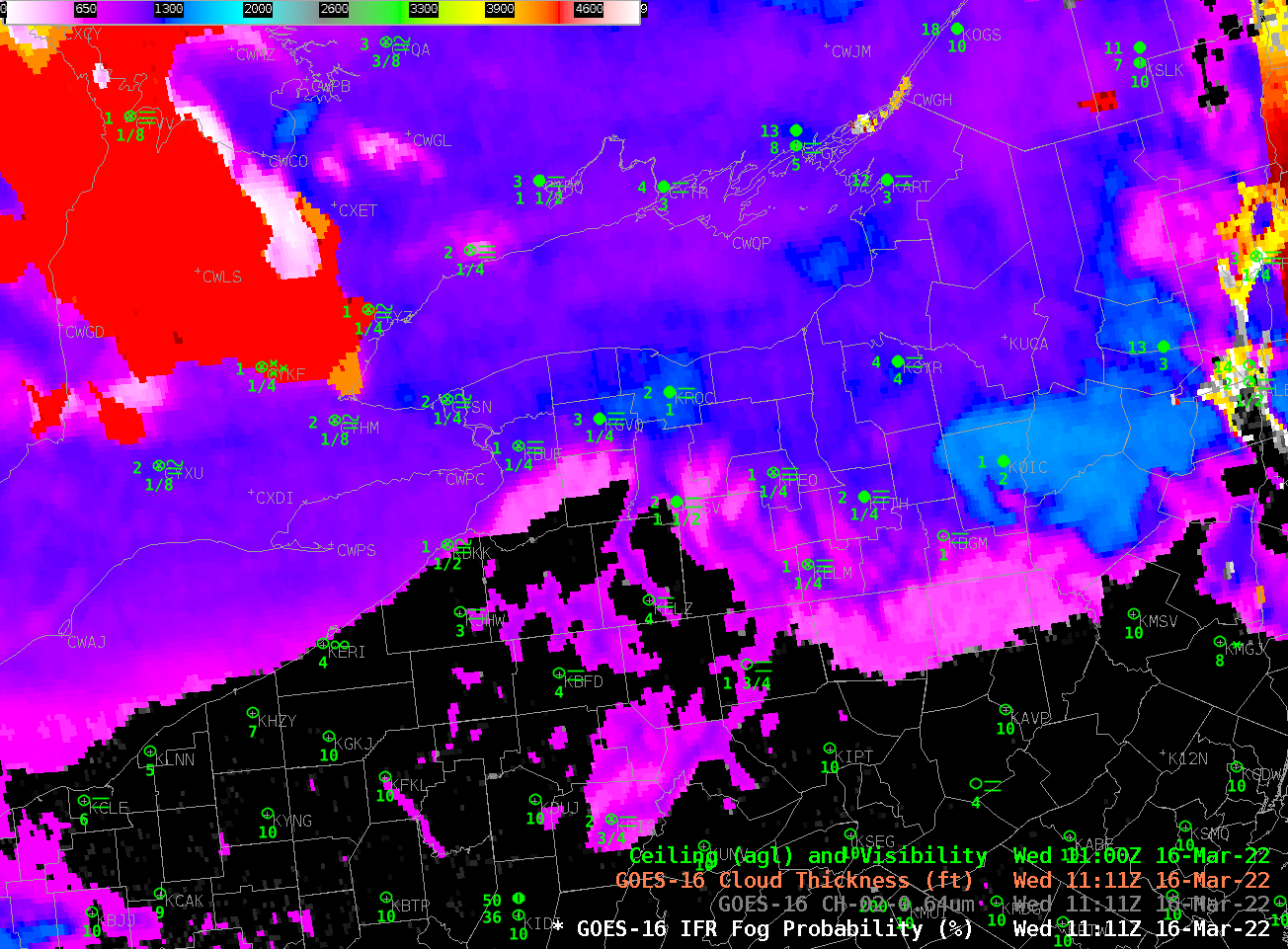
There are many ways to detect low clouds/fog day and night. In this case, a lack of high clouds over Pennsylvania meant that the Night Microphysics RGB gave a good signal where stratus clouds were present. IFR Probability allows for a consistent signal from night into day — and it includes a consistent signal where high clouds prevent the Night Microphysics RGB from indicating low clouds (Click here to see a toggle between the Night Microphysics RGB and GOES-R IFR Probability (with surface observations) at 1111 UTC).




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}