 |
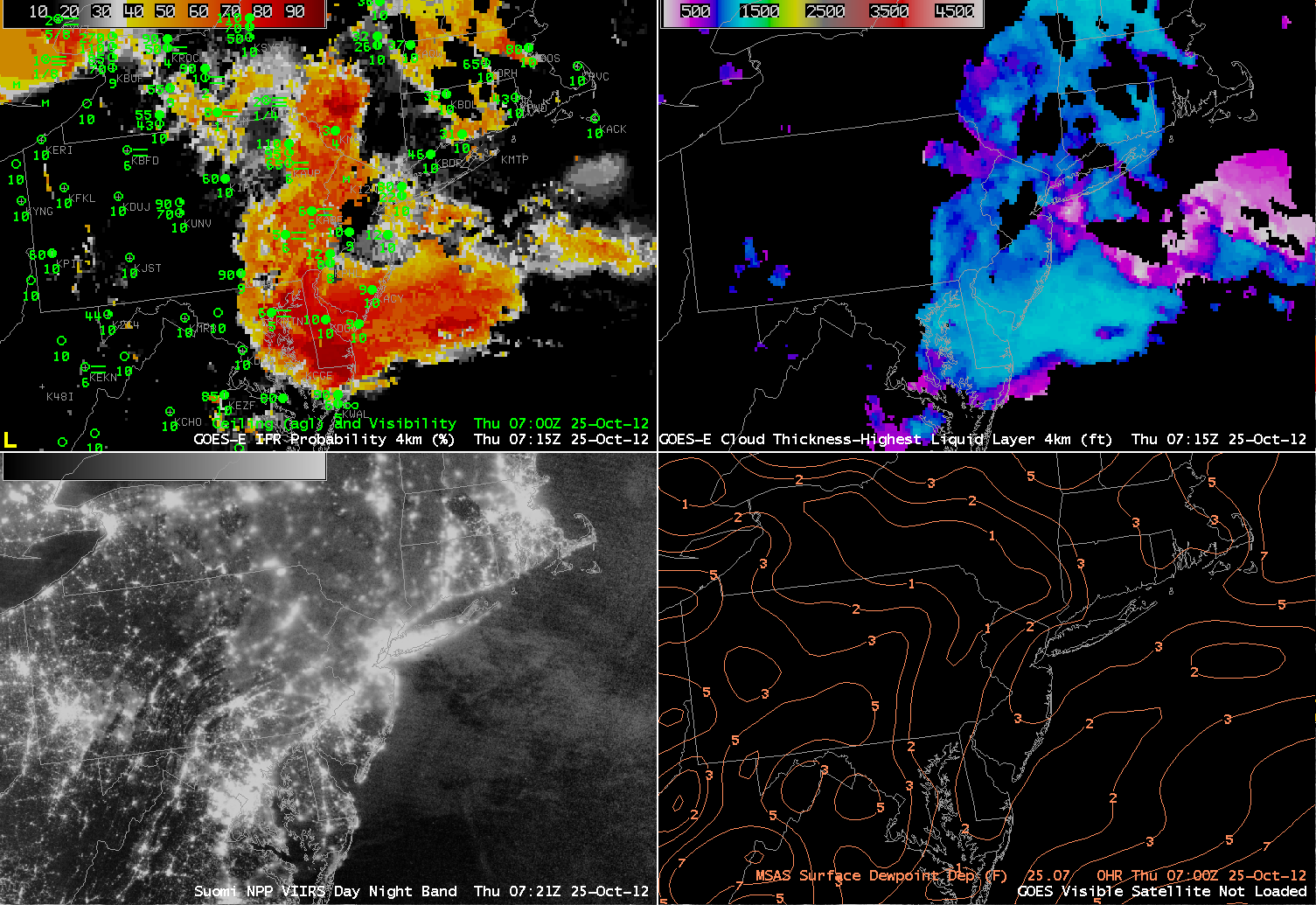
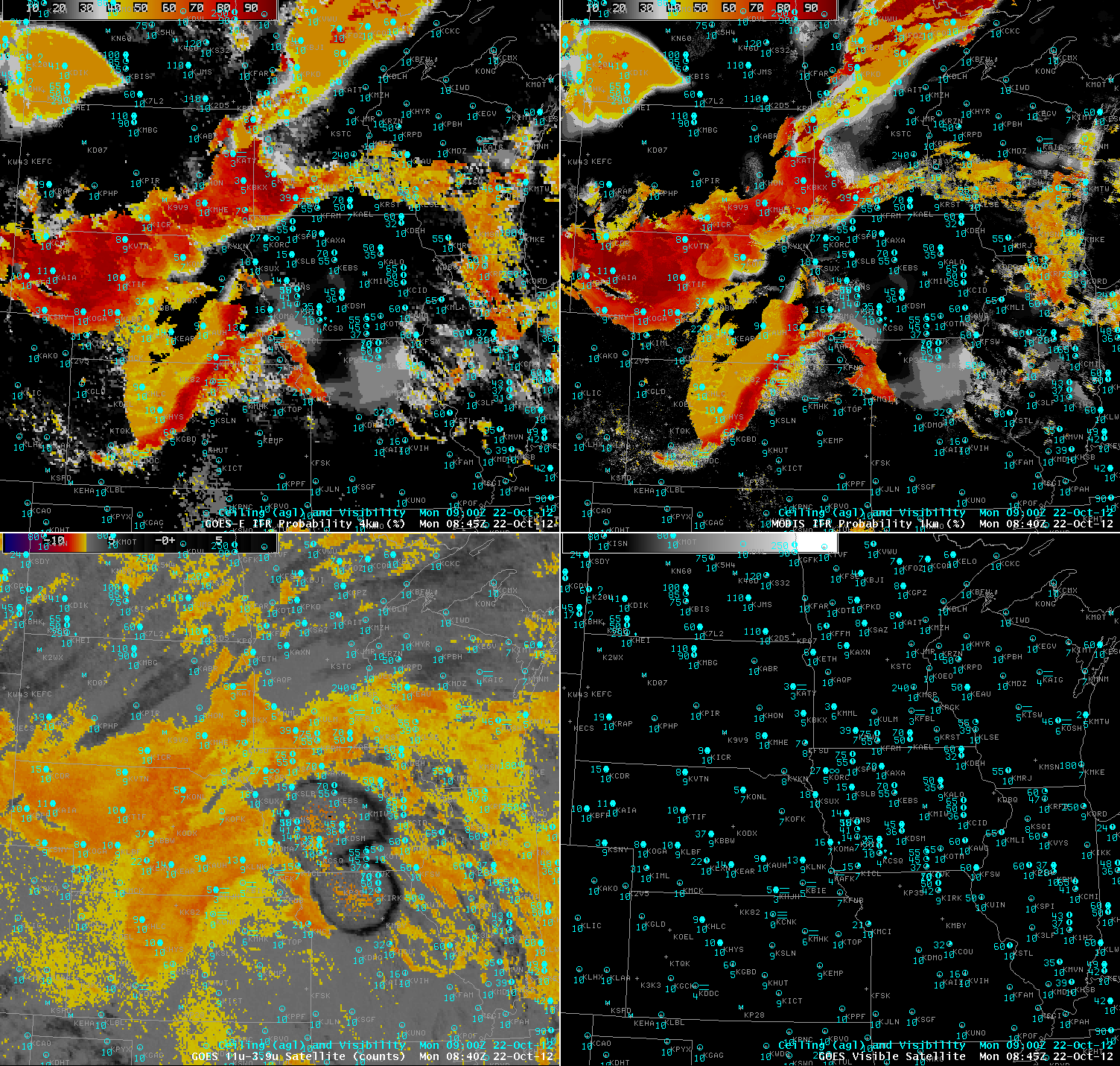
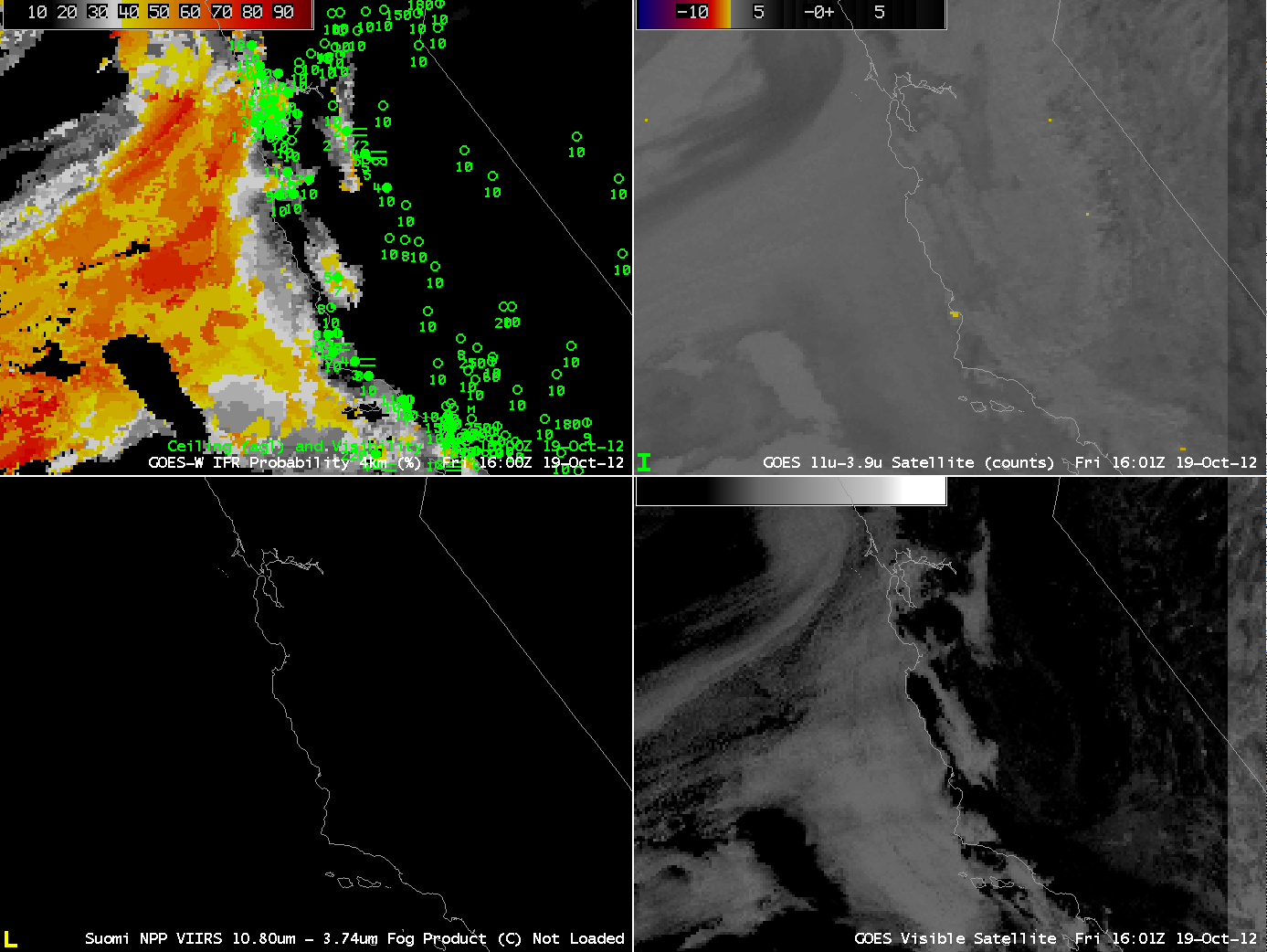
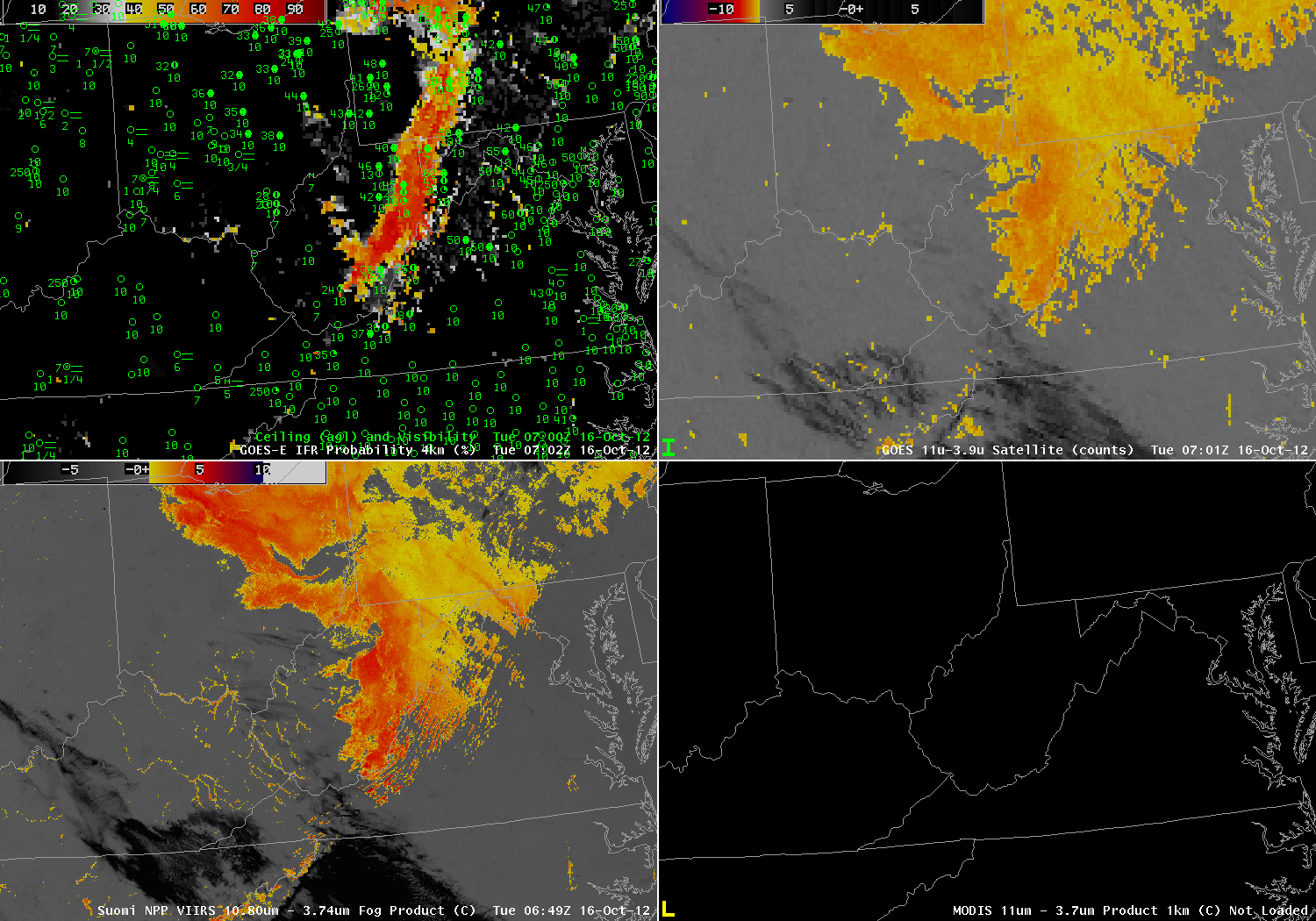
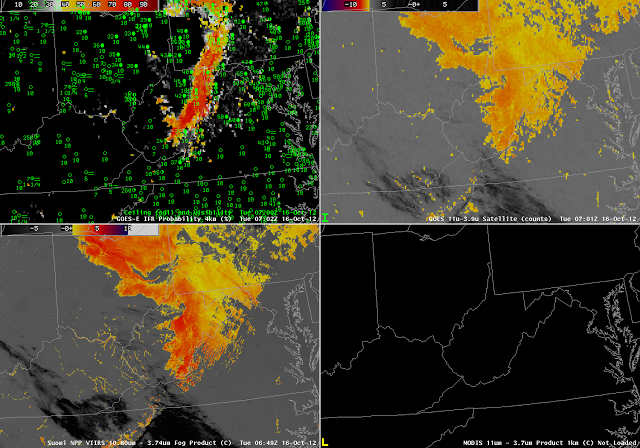
| GOES-R IFR Probabilities computed from GOES-14 (upper left), GOES-14 heritage brightness temperature difference product (upper right), VIIRS heritage brightness temperature difference product (lower left), MODIS heritage brightness temperature difference product (lower right), all from near 0700 UTC. |
MODIS and VIIRS yield satellite information that can be used to detect fog/low stratus at high spatial resolution. In the exa,ple above, the VIIRS brightness temperature difference product highlights many river valleys as possibly cloud-filled over eastern Kentucky, southern Ohio and southwestern West Virginia. The coarser resolution of the GOES satellite pixel precludes such fine-scale detection. Note, however, that both satellite platforms detect the presence of stratiform water clouds over north-central Ohio where surface observations show only mid-level cloudiness. IFR probabilities are confined to the spine of the Appalachians from the Laurel Mountains near Johnstown (PA) southward towards southern West Virginia. How do things evolve with time?
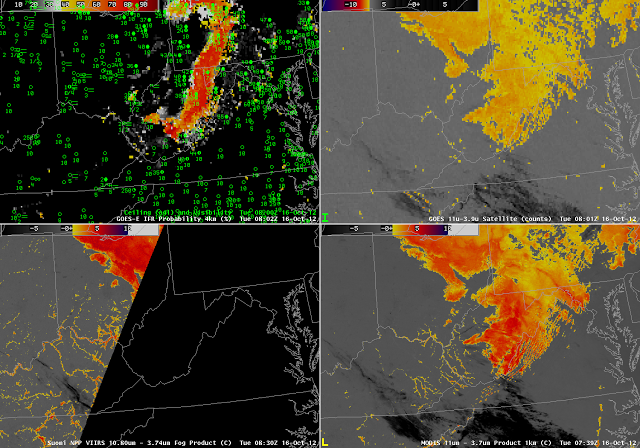 |
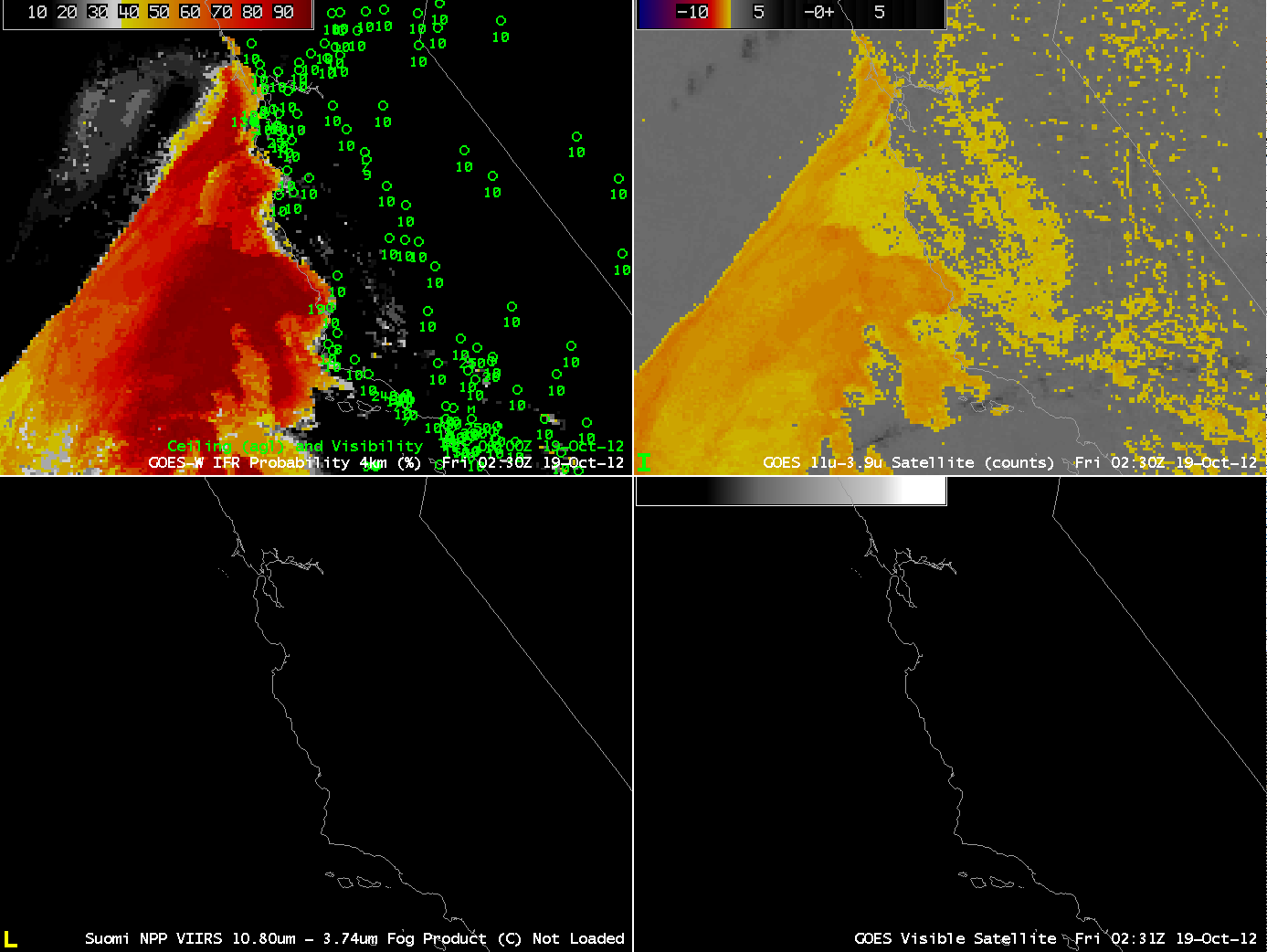
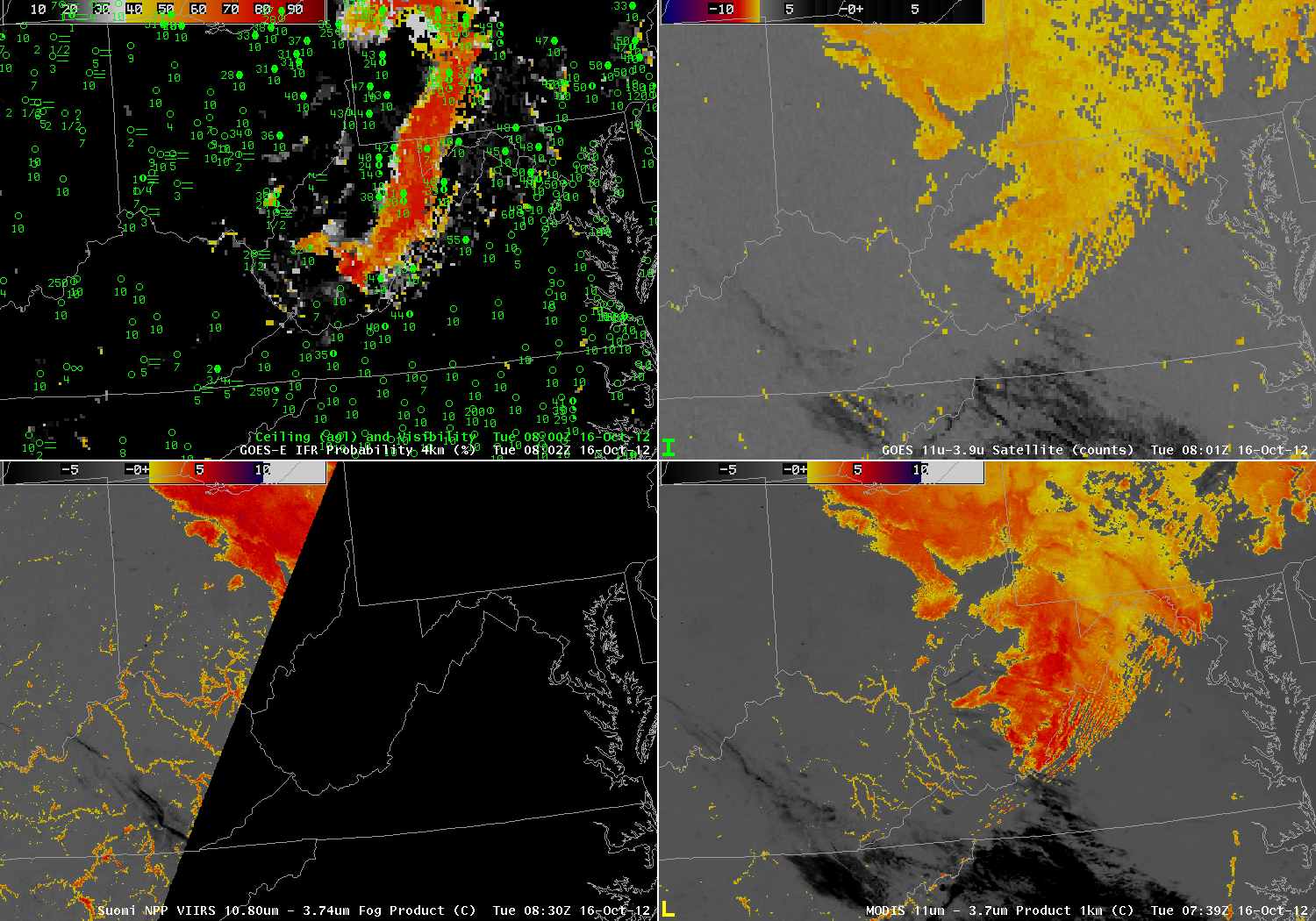
| As above, but from near 0800 UTC |
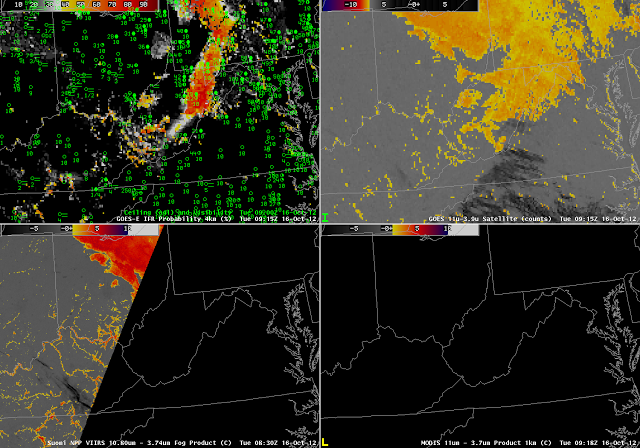 |
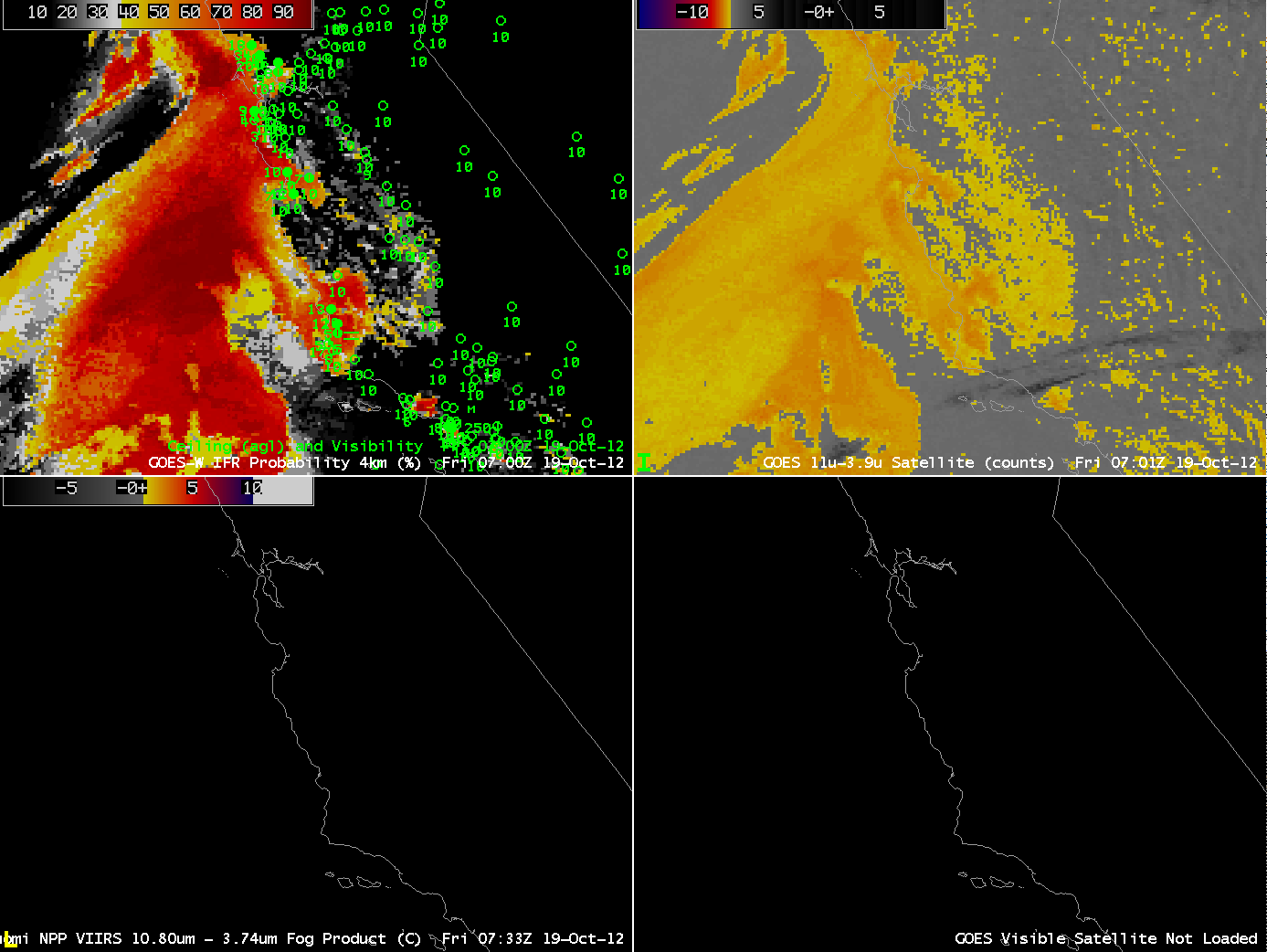
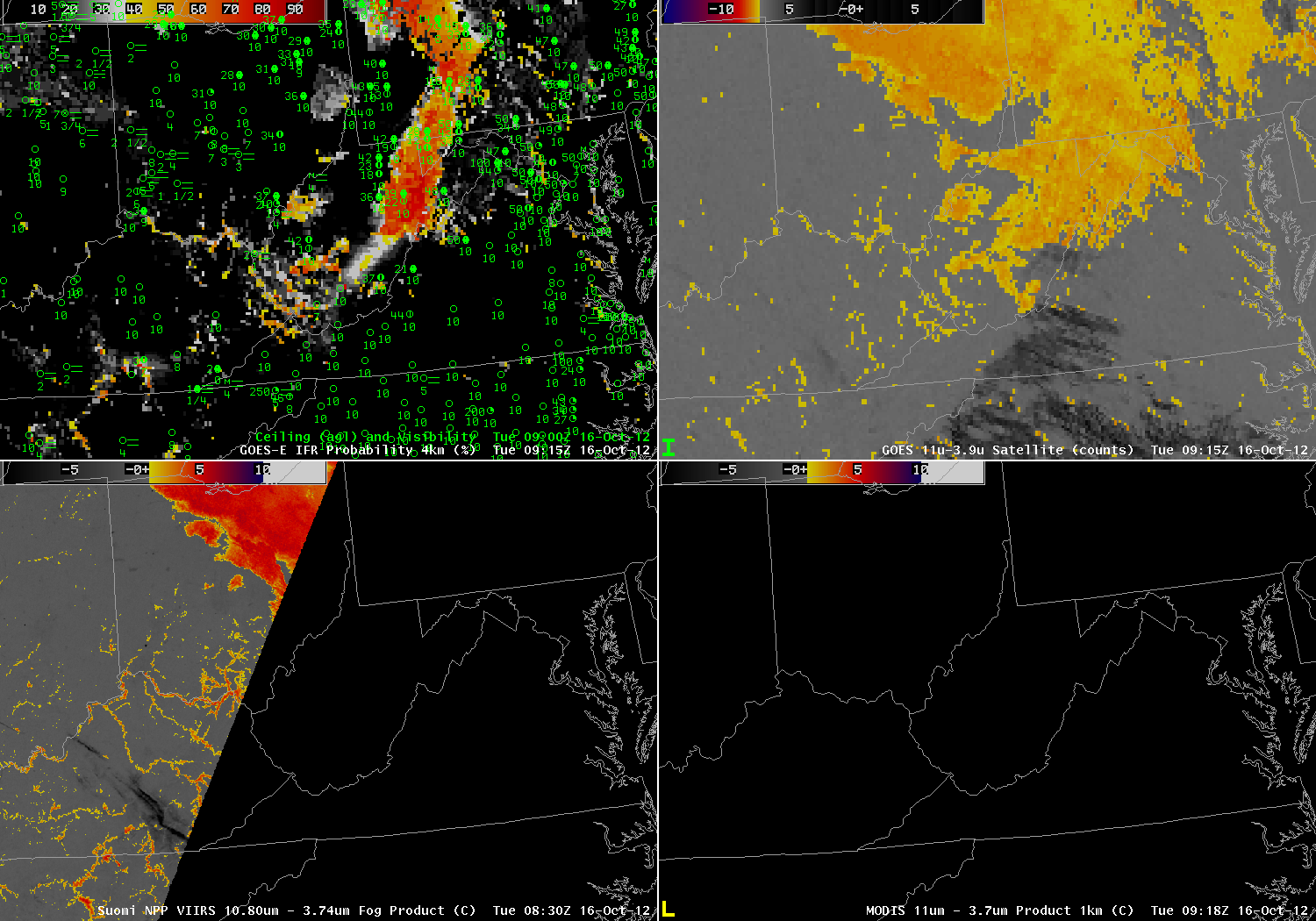
| As above, but from near 0915 UTC |
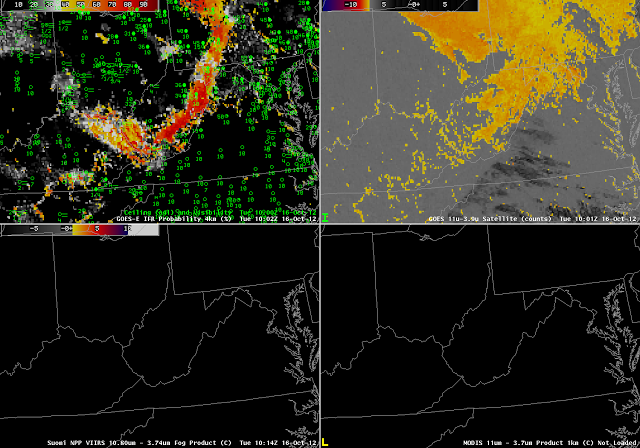 |
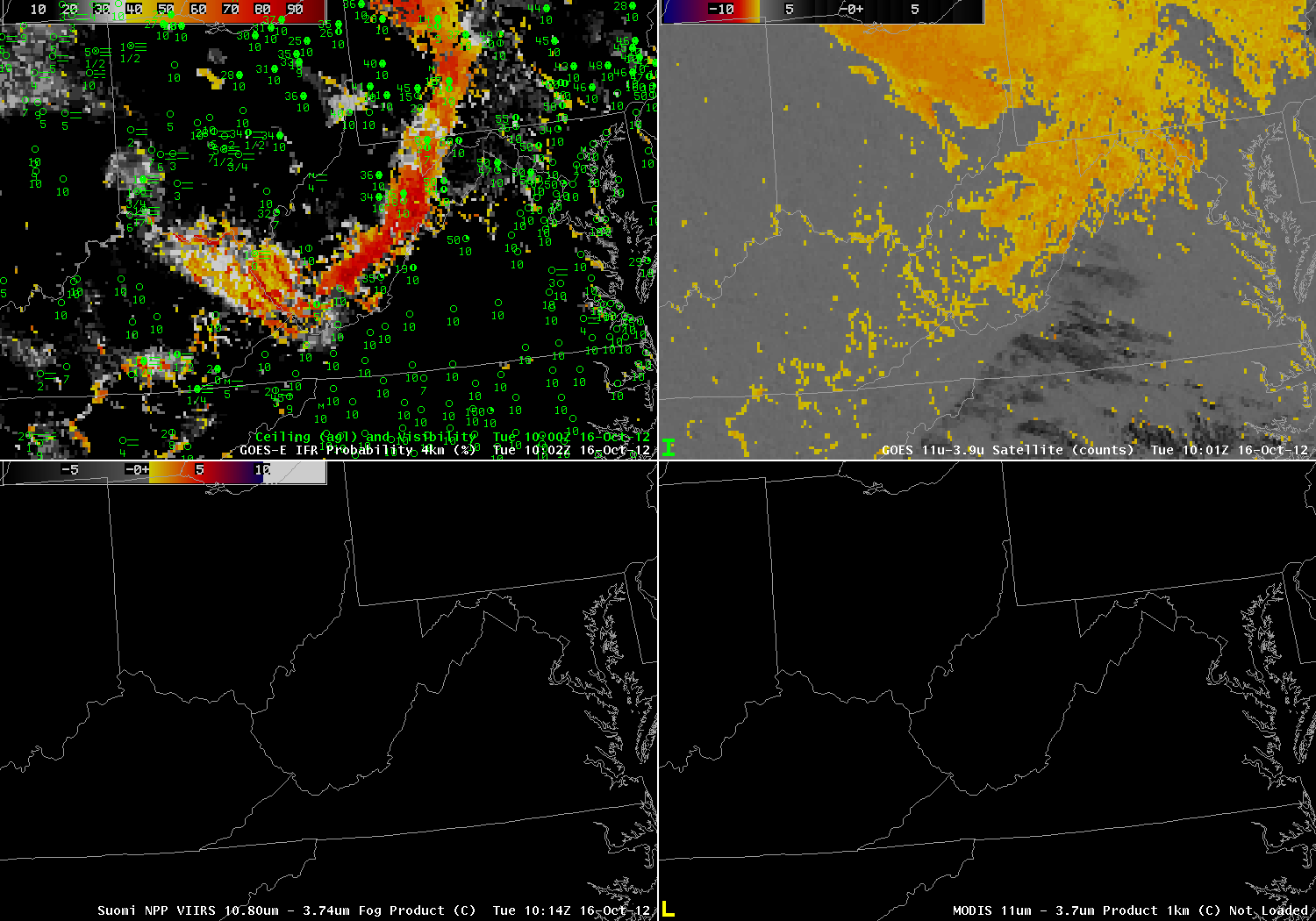
| As above, but from near 1000 UTC |
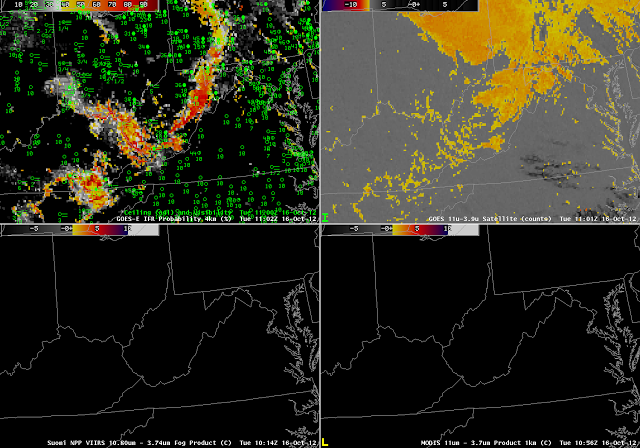 |
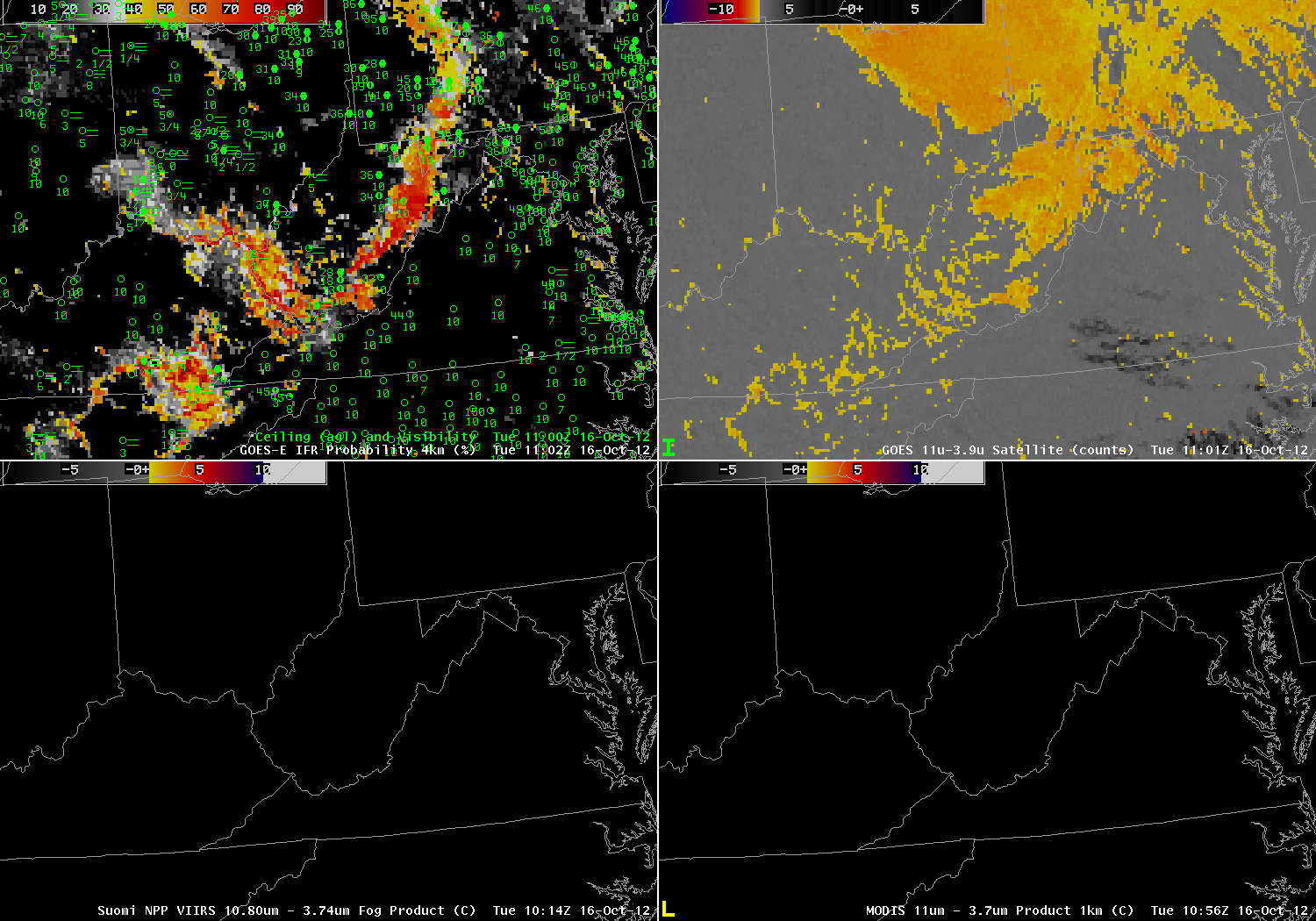
| As above, but from near 1100 UTC |
The power of GOES imagery in this case is to show the evolution of the fog/low stratus field. Even at this only-hourly timestep, the development of regions of IFR conditions is evident, and those developing conditions occur in tandem with increasing probabilities in the GOES-R IFR Probability field. Throughout the night, the GOES brightness temperature difference field flags the unimportant (from an aviation standpoint) stratus deck over northcentral Ohio, and the IFR probability field, which field also uses Rapid Refresh Model data, discounts the satellite signal. By 1100 UTC, the river valley signal has strengthened enough in the GOES imagery to appear, and a corresponding increase in IFR probability occurs.
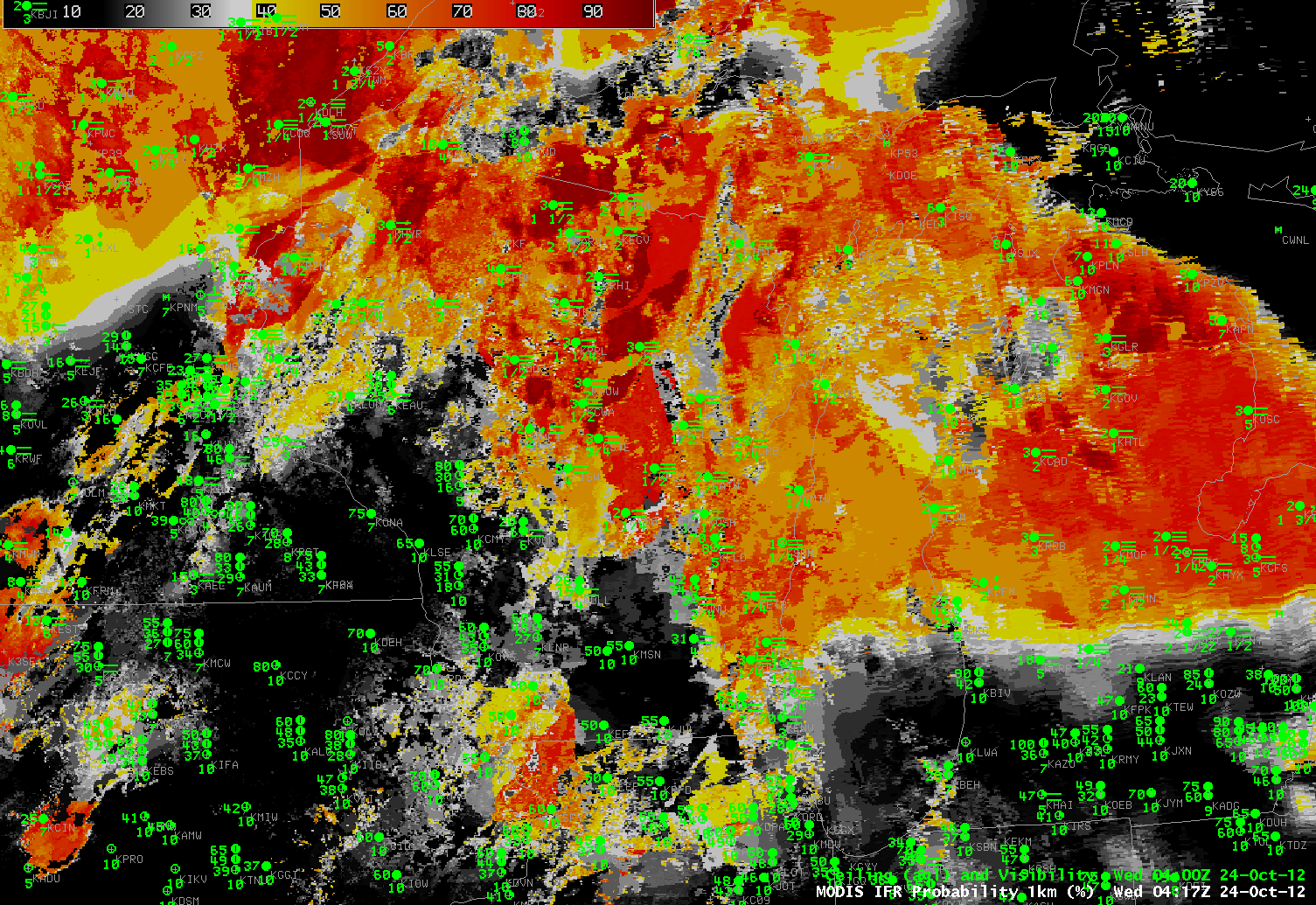
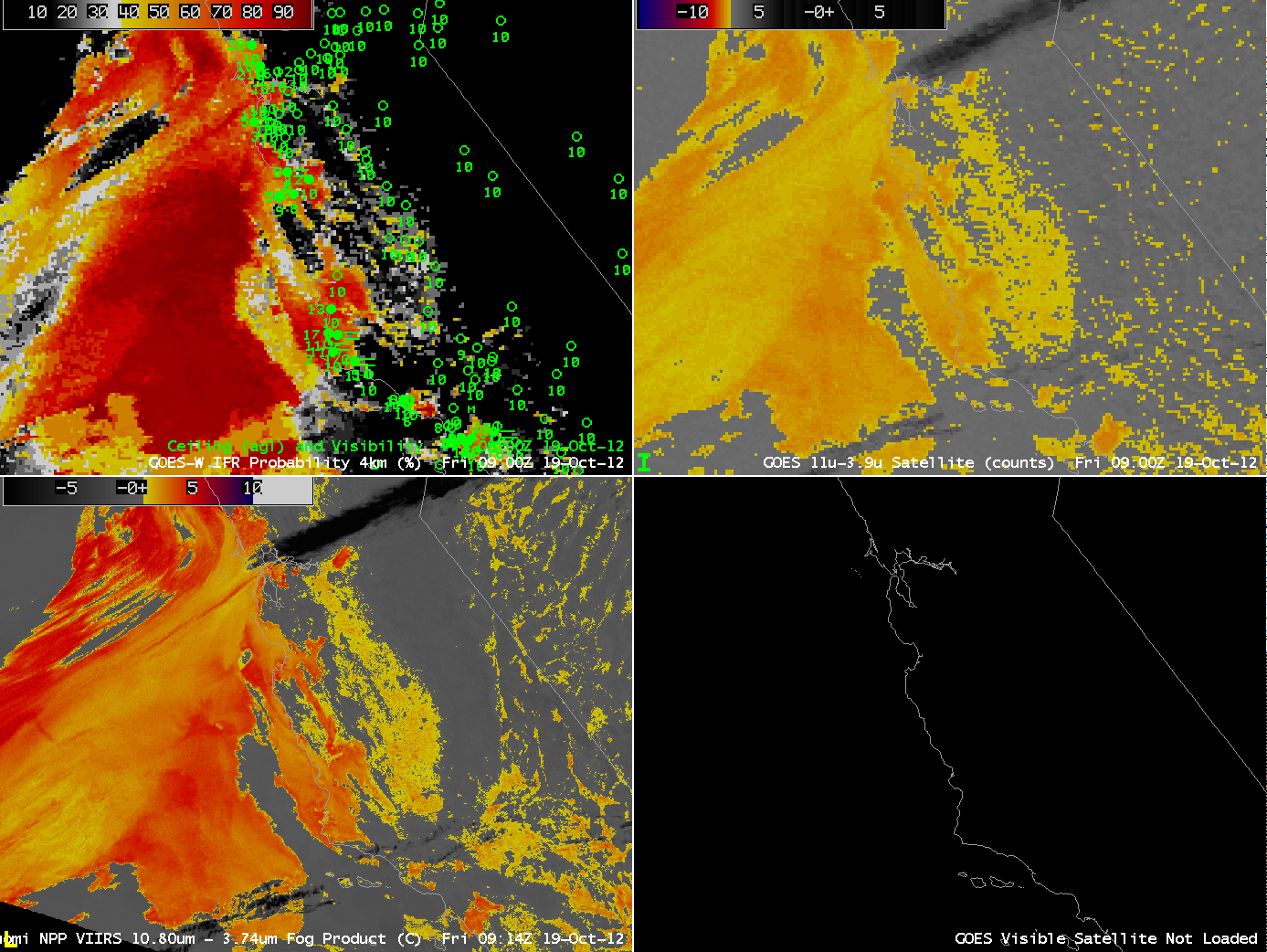
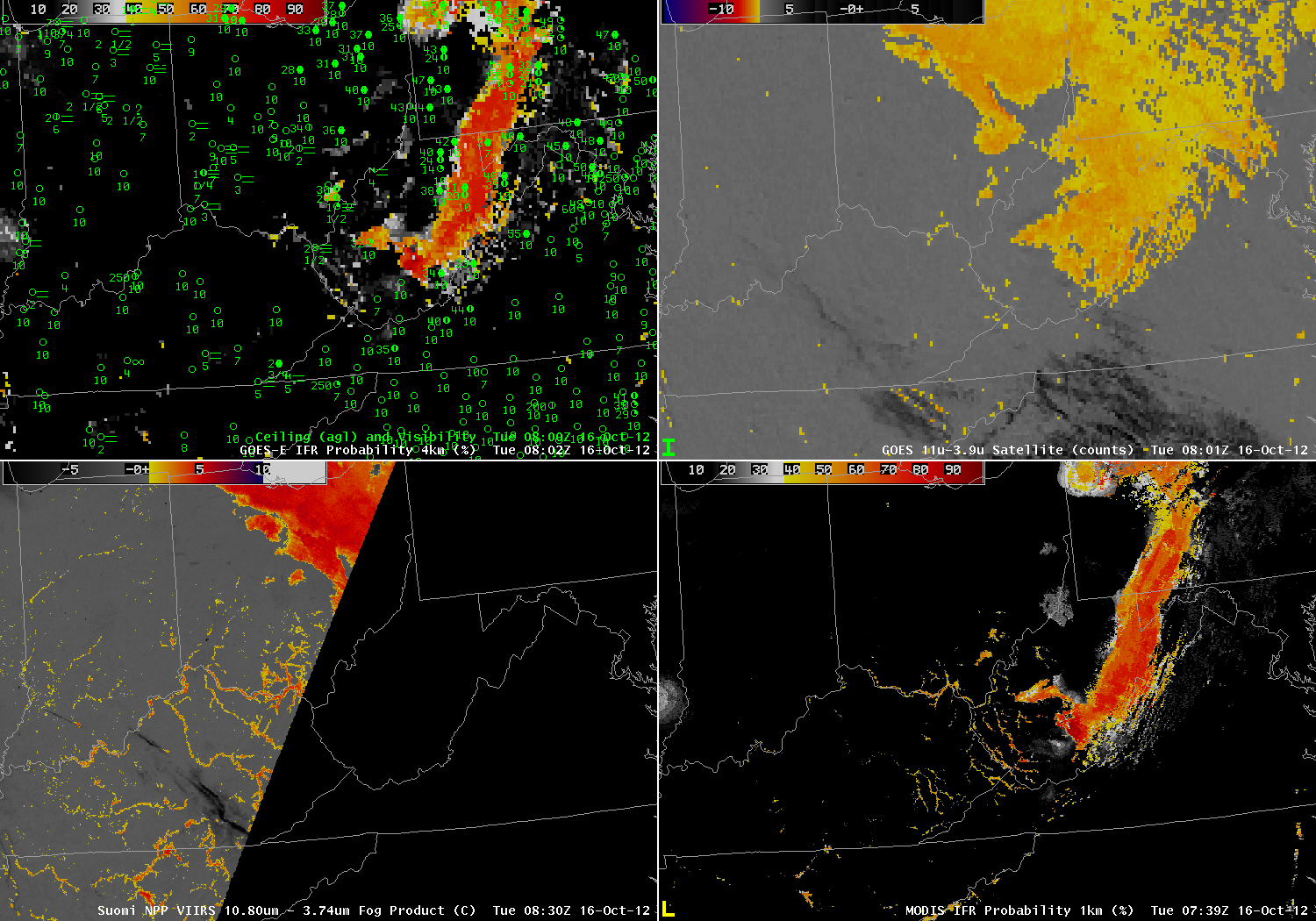
IFR Probability can also be computed using MODIS data (below). The 0739 UTC MODIS data, shown at the top of this blog post, highlights — as does GOES — the stratus deck over northern Ohio. The MODIS-based IFR probabilities, however, do not highlight that cloud-deck, by design. Note also that the higher-resolution MODIS imagery, because it detects river valley fogs at 0739 UTC, also has a strong IFR probability signal there. Pixel resolution on GOES-R will be intermediate between MODIS and present GOES.
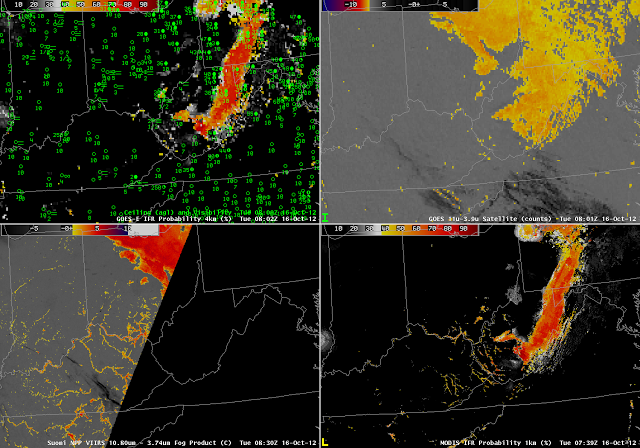 |
| As at top, for near 0800 UTC, but with MODIS-based IFR probabilities in the lower right |