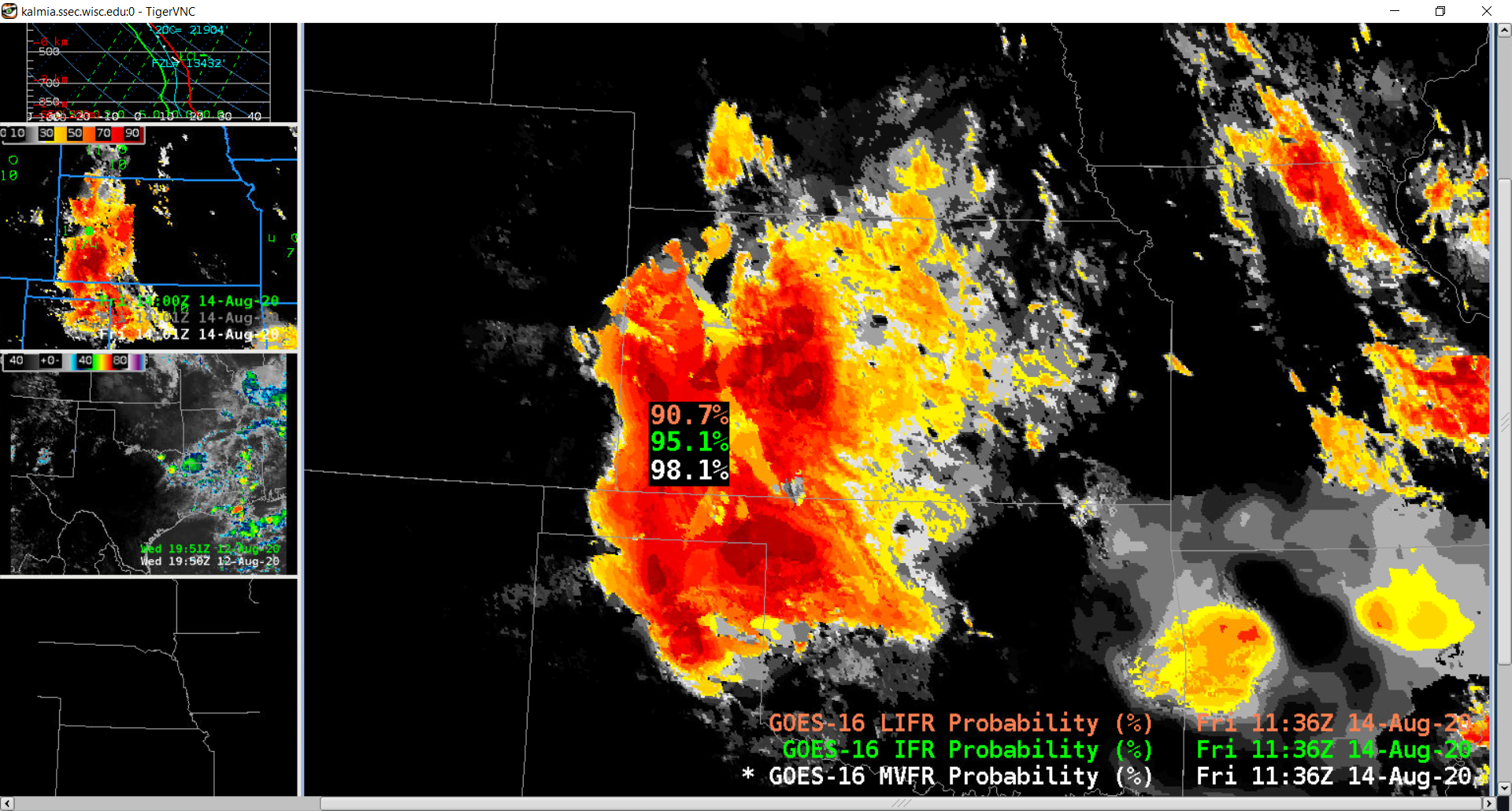
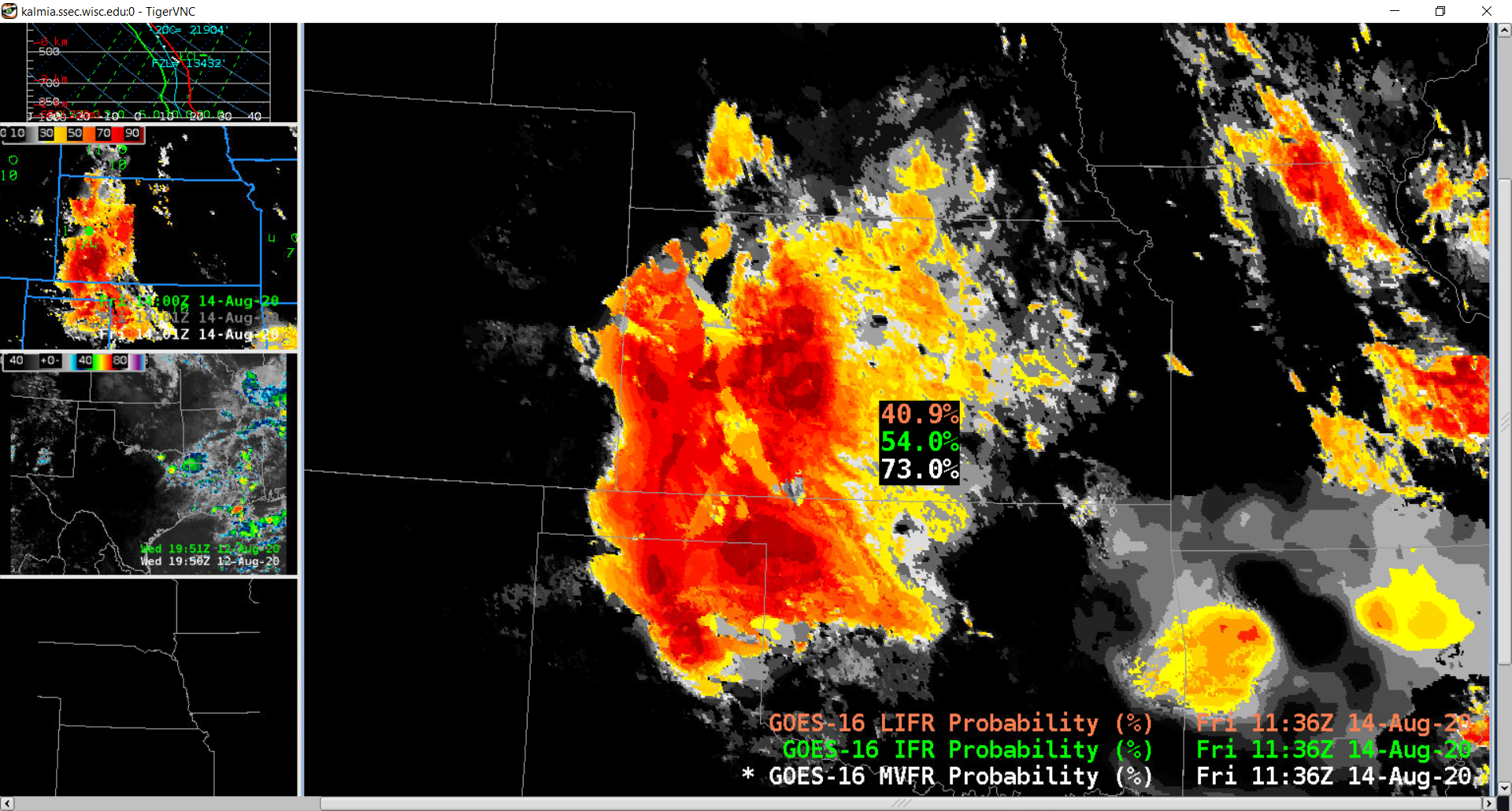
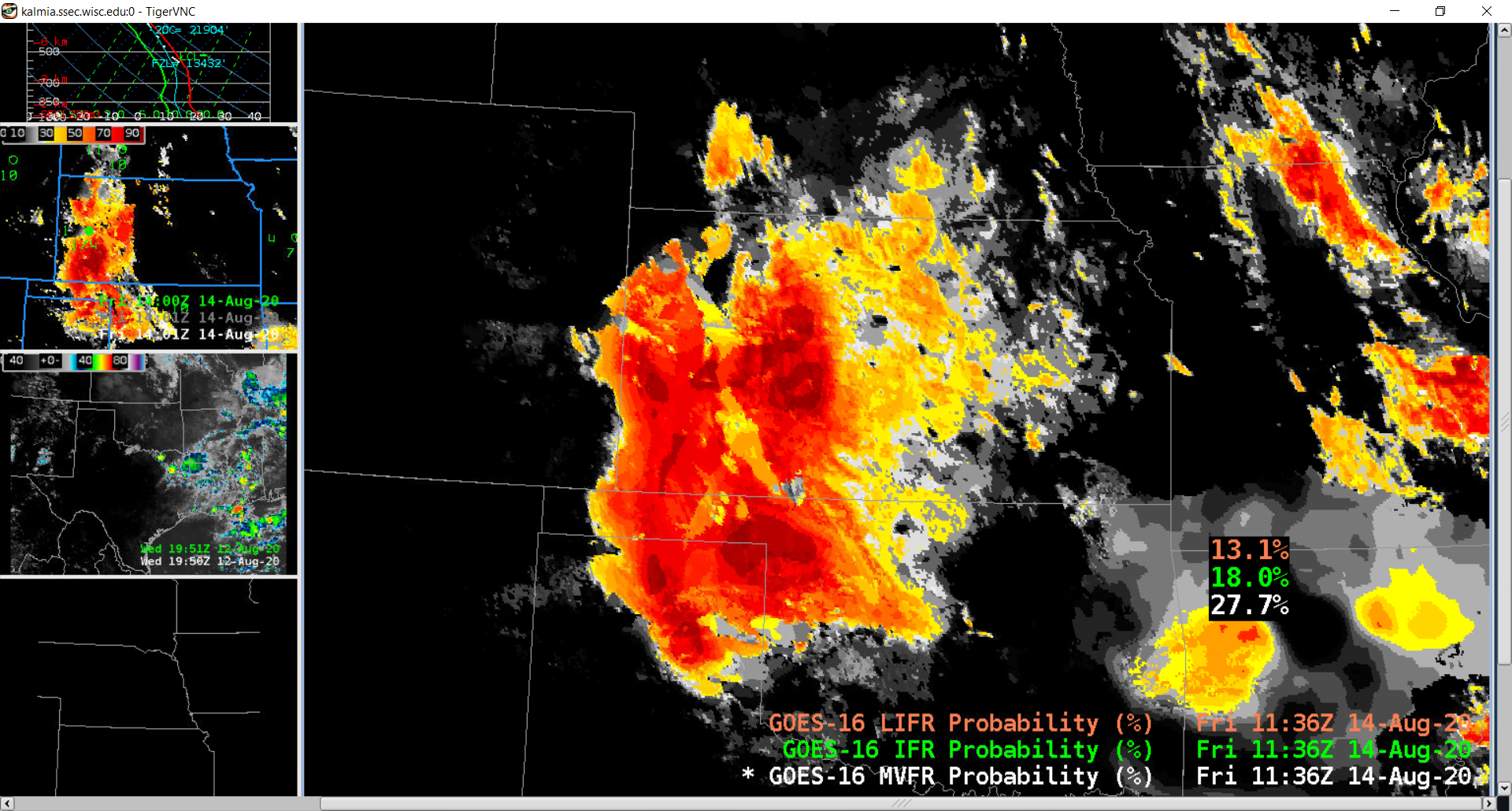
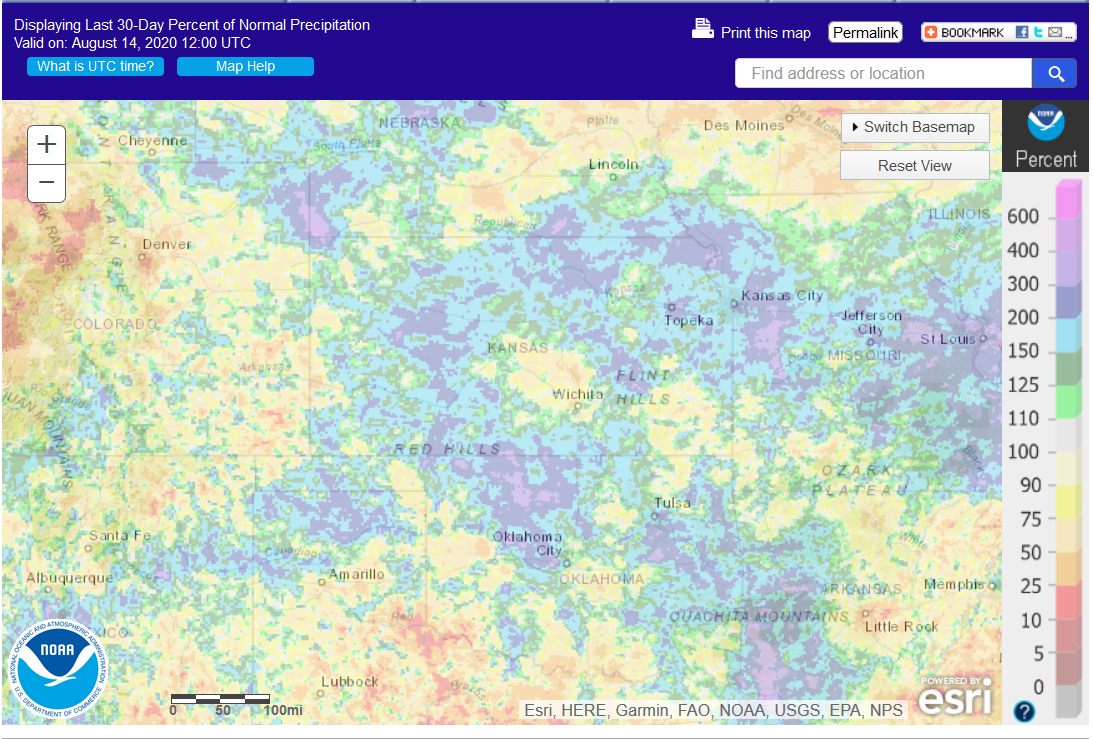
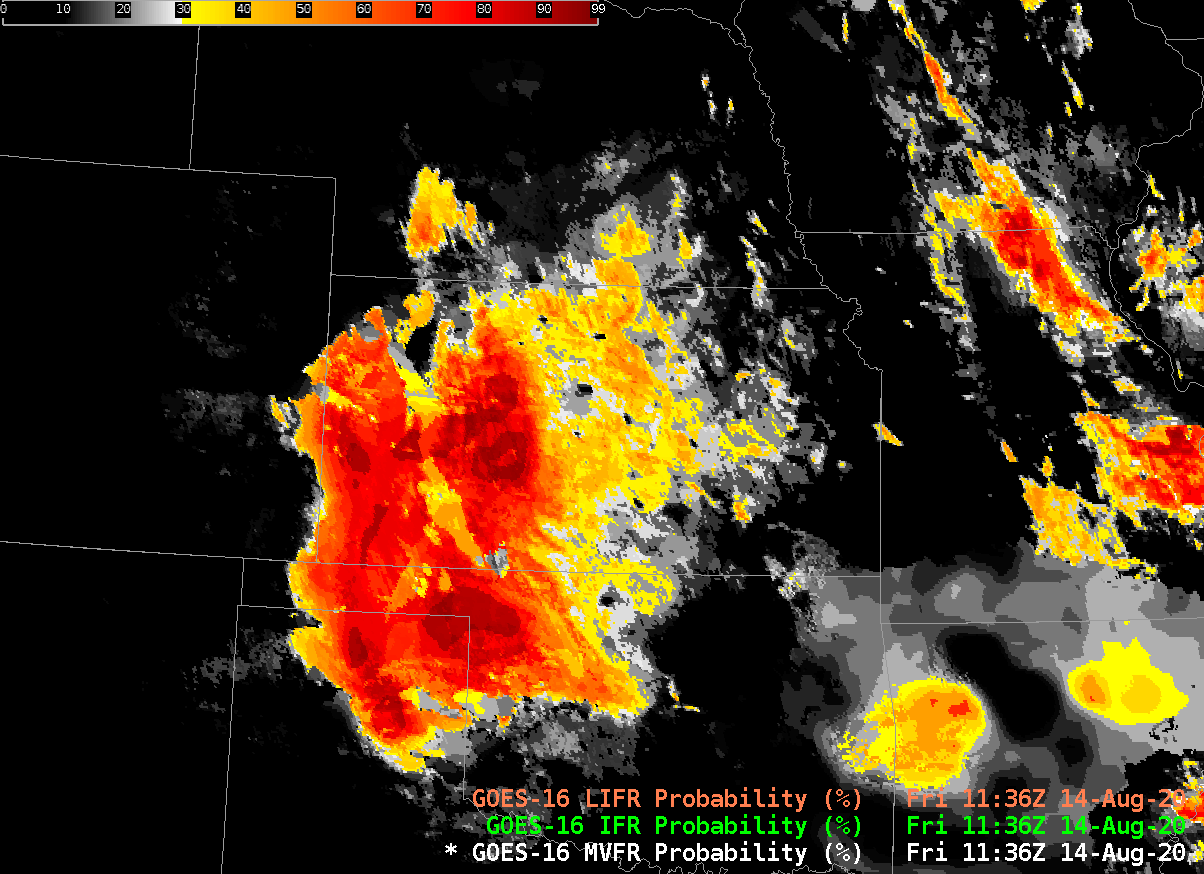
Fog developed over western Kansas during the early morning of 14 August 2020 (helped along by above-normal precipitation in the past 30 days — shown here in an image created at this website). Low IFR Probability fields, above, show greatest probabilities of low ceilings and visibility restrictions in regions where they were observed: over western Kansas, with a sharp cut-off at the Colorado/Kansas border, and over western Oklahoma and the north Texas panhandle.
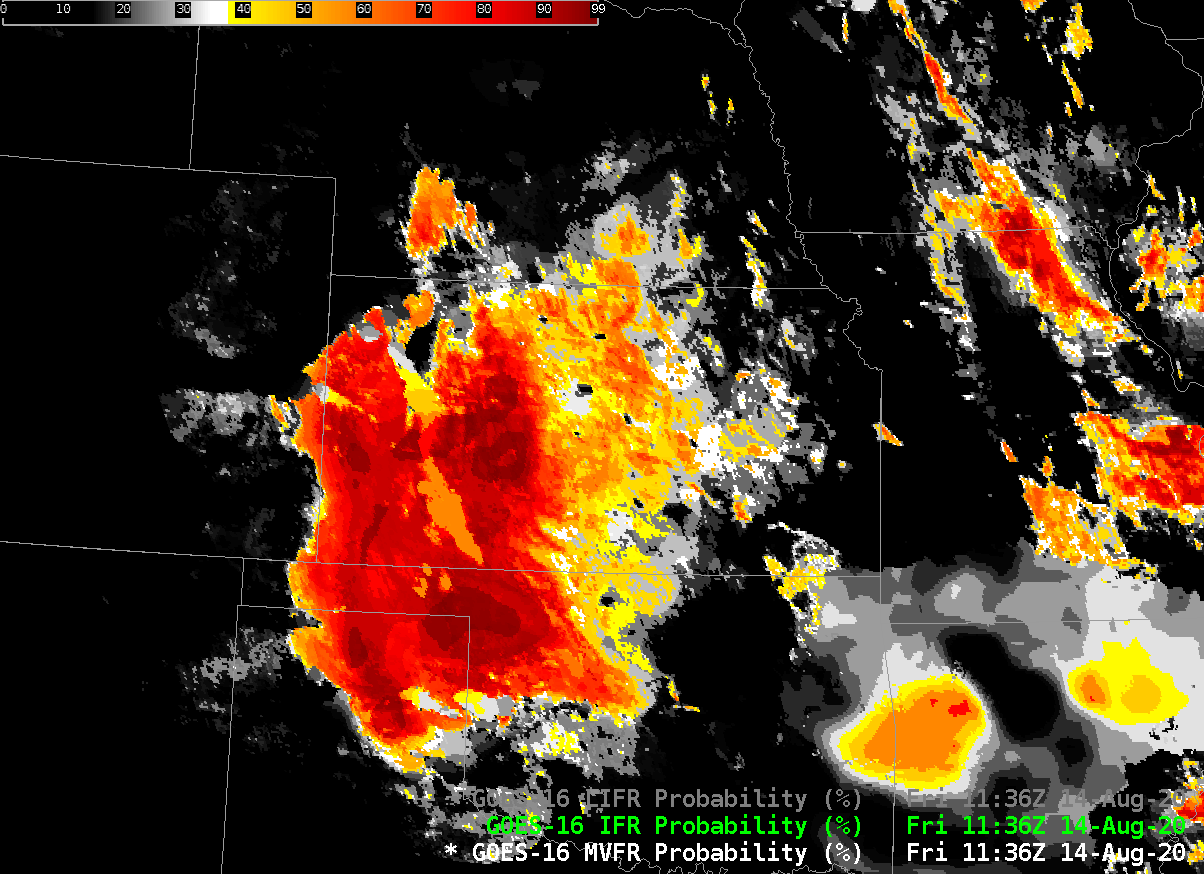
Compare the evolution of the Low IFR Probability field, above, to the evolution of the Night Fog brightness temperature difference (10.3 µm – 3.9 µm) field below.
- The Night Fog field, below, has a region of strong return over western Kansas, but also two regions of weaker signals over central Kansas (where low clouds/fog are observed; note the regions in the brightness temperature difference field where the signal is very small, small grey pockets within the cyan, corresponding to the locations of towns in central Kansas) and over eastern Colorado (where low clouds/fog are not observed). Low IFR Probability fields are able to distinguish between the central Kansas and eastern Colorado because model predictions of low-level saturation are used to modulate the satellite-based signal: Low IFR Probability values are very small over Colorado (where the Rapid Refresh model is not predicting low-level saturation); values are larger over Kansas where ceiling and visibility reductions are occurring and where the Rapid Refresh model is suggesting low-level saturation is present). The brightness temperature difference field in Colorado might be driven by dry soils rather than low clouds. A brightness temperature difference signal can emerge at night because of soil emissivity differences (as noted earlier in this blog here).
- Low IFR Probability fields are augmented underneath the convection that is apparent in the brightness temperature difference field over northwestern Arkansas. Satellite detection through the deep convection of low stratus in this region is impossible; the signal is driven by low-level saturation predicted by the Rapid Refresh model output.
- As the sun rises, the brightness temperature difference field loses obvious cloud-detection signal because increasing amounts of reflected solar radiation (at 3.9 µm) overwhelm the emissivity-driven difference over low clouds at 3.9 µm and 10.3 µm. At some point after sunrise, the brightness temperature difference flips sign (and appears dark in the enhancement) because there is far more reflected solar radiation at 3.9 µm than at 10.3 µm.
- The Low IFR Probability field by design includes temporal continuity around sunrise and sunset. This is most noticeable over central Kansas. The terminator sweep is noticeable in the field, but the values change only slowly in the hour surrounding the terminator. This temporal continuity is necessary because of the quick changes in detected 3.9 µm radiation that are occurring as solar reflectance changes occur.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}