GOES-R IFR Probabilities, 0100-1315 UTC on 25 April 2017 (Click to enlarge)
Note: GOES-R IFR Probabilities are computed using Legacy GOES (GOES-13 and GOES-15) and Rapid Refresh model information; GOES-16 data will be incorporated into the IFR Probability algorithm in late 2017.
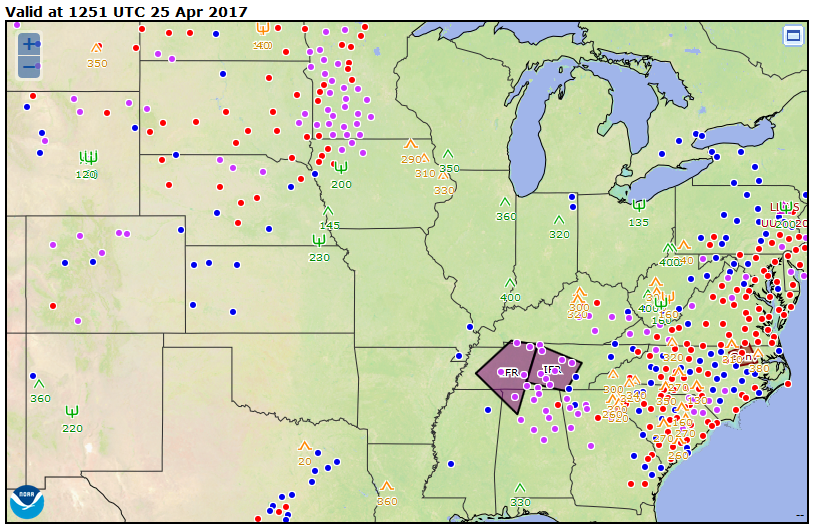
Dense Fog Advisories were issued over the Tennessee River Valley on Tuesday 25 April. The National Weather Service Aviation Weather website highlighted the regions of IFR conditions shortly after sunrise. IFR Probability fields, above, showed a slow increase in probabilities as ceilings and visibilities lowered during the night. The field outlined the region where IFR conditions were developing/occurring, meaning that it was a good situational awareness tool as the fog developed.
{kind=link}
{kind=link}
Brightness Temperature Difference fields, below, have historically been used to detect low clouds and by implication, fog. Clouds composed of water do not emit 3.9 µm radiation as a blackbody in contrast to their emissions of 10.7 µm radiation that are more like that of a blackbody. Thus, computed brightness temperature values are colder using 3.9 µm radiation than 10.7 µm radiation over water clouds. In the animation below, Brightness Temperature Difference values cooler than -1 C are highlighted in yellow.
Note that High Clouds in the animation below over the Smoky Mountains prevent an accurate depiction of low clouds formation there. IFR Probability fields, at top, include a signal in that region because model data from the Rapid Refresh model suggests saturation is occurring.
As the sun rises, at the end of the animation below, increasing amounts of reflected 3.9 µm radiation cause the brightness temperature difference field to flip in sign. In contrast, the IFR Probability fields, at top, maintain a coherent signal through sunrise.
Alert readers may note that Brightness Temperature Difference fields and IFR Probabilities are not shown from 0400 UTC. At that time, Stray Light signals were present in the Brightness Temperature Difference field and they contaminated both the Brightness Temperature Difference and the IFR Probability fields.
GOES-13 Brightness Temperature Difference (3.9 µm – 10.7 µm) from 0100 through 1315 UTC on 25 April 2017 (Click to enlarge)
GOES-16 is transmitting non-operational data that are undergoing testing and refinement. The toggle below shows the brightness temperature difference field from GOES-16 and GOES-13 for one time on 25 April. Note the superior resolution in the GOES-16 data: 2 km at the subsatellite point vs. 4 km for GOES-13. As noted at the start of this blog post, GOES-R IFR Probabilities are being computed with GOES-13 and GOES-15 data, not with GOES-16 data. Incorporation of GOES-16 data into the algorithm will occur near the end of 2017.
The GOES-16 data posted on this page are preliminary, non-operational data and are undergoing testing.

GOES-16 and GOES-13 Brightness Temperature Difference fields, 1300 UTC on 25 April 2017 (Click to enlarge)